BiomEcANIque

BIOMECANIQUE
RAPPELS
On a les grandeurs physiques fondamentales (7) et les dérivées.
Les fondamentales :
- la longueur m
- le temps s
- la masse kg
- intensité lumineuse cd (candela)
- la quantité de matière mol
- le courant électrique A
- la température K (Kelvin)
Les dérivées :
- la force N ou kg.m.s-2
- la pression Pa ou N.m-2 ou kg.m-1.s-2
- le travail N.m ou kg.m2.s-2
- la puissance W ou N.m.s-1 ou kg.m2.s-3
101 déca (da) 10-1 0.1 déci (d)
102 x100 hecto (h) 10-2 0.01 centi (c)
103 x1000 kilo (k) 10-3 milli (m)
106 méga (M) 10-6 micro
109 giga (G) 10-9 nano (n)
72 km/h = 72000m/3600s 20m.s-1
3 m.s-1 = 3.10-3 x 3600 = 10.8 km.h-1
THEOREME DE PYTHAGORE
(Hyp)² = A² + B² + 2AB cos
Norme = distance du vecteur :
Sin = coté opposé / hyp
Cos = coté adjacent / hyp
Tang = coté opposé / coté adjacent
Les vecteurs servent à représenter des grandeurs physiques associé à une direction
AB = A’B’
I. ADDITION VECTORIELLE
1- La méthode graphique
A+B = B+A
(A+B)+C = A+(B+C)
2- La méthode analytique
Pour des coordonnées cartésiennes il faut définir un repère (origine O; 3 axes directs)
A
B
Hyp

Selon la règle des trois doigts de la main droite
- pouce = vecteur i
- index = vecteur j
- majeur = vecteur k
Méthode :
A(xA ; yA ; zA) et P(xP ; yP ;zP) le vecteur MP (xP-xA ; yP-yA ; zP-zA)
Ex : A(3 ; 1 ; 2) et P(6 ; 1 ; 1) le vecteur MP (3 ; 0 ; -1)
xA = OA cos
yA = OA sin
Ex : si v = 1.8 m..s-1 et un angle de 22° alors vx = 1.8 cos 22 et vy = 1.8 sin 22
AB (4 ; 2 ; 0) et CD (-1 ; 3 ; 0)
AB+CD (4-1=3 ; 2+3=5 ; 0+0=0)
II. MULTIPLICATION VECTORIELLE
1- Produit d’un vecteur par un scalaire
Cela donne un nouveau vecteur dont la norme est : k * vecteur A
Il aura la même ligne d’action (parrallèle) et sera de même sens si k>0 et de sens opposé si
k<0.
Ex : si k = 3
2- Produit d’un vecteur par un vecteur
le produit scalaire : a.b = norme de a * norme de b * cos
avec = angle fermé entre les vecteurs a et b
Ex : vecteur a (4 ; 0) et vecteur b (6 ; -6)
Norme de a = 4
Norme de b = 6racine2
a.b = 4 * 6racine2 * cos 45 = 24
Autre méthode :
A (Ax ; Ay ; Az) et B (Bx ; By ; Bz)
A.B = AxBx + AyBy + AzBz = 4*6 + 0*(-6) + 0*0 = 24
Exemples où l’on retrouve les produits scalaires :
P = F.v
W = F.OM
le produit vectoriel : toujours en trois dimensions, ab = c
dont la norme de c est égale à : norme de a * norme de b * sin
- la ligne d’action va être perpendiculaire au plan défini par les vecteurs a et b
- le sens est donné par la règle du pouce de la main droite :
on suit le 1er vercteur (a)
kA
A
A
yA
xA
O

la paume regarde le 2ème vecteur (b)
le pouce donne la direction de c
Ex : vecteur a (4 ; 0) et vecteur b (6 ; -6)
Norme de a = 4
Norme de b = 6racine2
ab = c = 4*6racine2 * sin 45 = 24
ab ba ab = -(ba)
Autre méthode :
A (Ax ; Ay ; Az) et B (Bx ; By ; Bz)
C = AB = (AyBz – AzBy ; AzBx – AxBz ; AxBy – AyBx)
Ax Bx
Cx = Ay By
Cy = Az Bz
Cz = Ax Bx
Ay By
Exemples où l’on retrouve les produits vectoriels :
Les moments de force : M = OMF
Ex : Trouver le produit scalaire et le produit vectoriel
Vecteur a appartient à (x ; y) et sa norme est 7.4
Vecteur b est sur l’axe des z et sa norme est 5
a.b = 7.4 * 5 * cos 90 = 0
ab = 7.4 * 5 * sin 90 = 37 donc ba = -(ab) = -37
avec l’autre méthode on obtient
ax = 7.4 cos 250 = -2.53 bx = 0
ay = 7.4 sin 250 = -6.95 by = 0
az = 0 bz = 5
ab (-34.76 ; 12.65 ; 0)
SYSTEME MUSCULAIRE ET ELEMENTS DE MECANIQUE MUSCULAIRE
III. INTRODUCTION
Le muscle a plusieurs rôles :
Dans la nutrition du cartilage articulaire.
Au niveau vasculaire, en estompant les variations de tension.
Un rôle important au niveau des réserves énergétiques.
Au niveau des os, pour leur nutrition. Il influence également l'orientation des fibres de
collagène de l'os, sur lesquelles viennent se fixer le calcium, et qui constituent les ostéons.
Mais la fonction première du muscle est d'ordre mécanique :
Aspect statique : maintien postural
Aspect dynamique : mise en mouvement
Sa propriété fondamentale est de répondre à une stimulation par une succession de
phénomènes internes qui se traduisent par une contraction musculaire qui elle-même assure le
maintien du système squelettique, soit sa mise en mouvement.
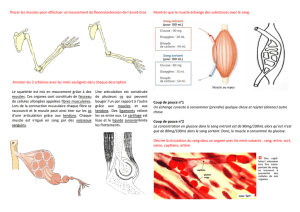
3- Rappels : la contraction musculaire et le muscle strié
L'épimysium est l'enveloppe conjonctive qui entoure le muscle, qui est constitué de faisceaux.
Ces faisceaux sont entourés par le périmysium, et sont eux-mêmes constitués de fibres
musculaires, entourés par l'endomysium.
Cf. figures 1, 2 et 3 :
On retrouve l'actine, la myosine et la titine (structure élastique qui retient la myosine à sa
place).

Les actines G (monomères d'actine) se mettent bout à bout pour donner l'actine F. Deux
filaments d'actine F torsadés donnent un filament d'actine.
Chaque actine G possède un site d'emplacement de la myosine. Autour des filaments
d'actine s'entourent les tropomyosines et des molécules de troponine, qui ont un site
d'attachement à l'actine et un site d'attachement au calcium. La troponine masque le site
spécifique d'attachement des ponts entre actine et myosine, empêchant ainsi la formation
des ponts. Lors de la libération du calcium par le réticulum sarcoplasmique, on a un
changement de configuration de la troponine (glissement) qui induit une libération du site
actine / myosine.
Le filament de myosine est constitué de deux segments (S1, la tête et S2, la queue). La
myosine possède un site d'attachement à l'actine et un qui peut dissocier l'ATP (pour
fournir l'énergie qui détache ensuite les ponts).
La titine jouerait un rôle dans le rétablissement de la longueur de repos du sarcomère.
a. Modification de la structure du sarcomère lors de la contraction
Cf. fig. 4
La longueur de la bande A reste inchangée, la zone H disparaît pour un raccourcissement égal
à 85% de la LR (longueur de repos). La bande I diminue jusqu'à disparaître pour un
raccourcissement égal à 65% de la LR (ou L0). C'est la théorie des filaments glissants.
b. Typologie des fibres musculaires
Fibres I
(sombres, ou ST)
Fibres II
(FTA, FTB)
II A (rouges)
II B (blanches)
Surface (en m²)
3,9
4,9
5,2
Nombre de mitochondries
+++
++
+
Myglobine
+++
++
+
Réserve en triglycérides
+++
++
+
Densité en réticulum sarcoplasmique
+
++
+++
Vitesse de conduction axonale
58 – 92 ms-1
85 – 114ms-1
Influence de la surface des fibres : le recrutement des myofibrilles est plus important, ce qui
développe plus de force, et donc plus de puissance.
4- Organisation du système musculaire
a. Morphologie
Les muscles longs sont situés au niveau des membres Puissance.
Les muscles larges sont situés au niveau de l'abdomen et du dos Endurance.
Les muscles courts sont situés au niveau des articulations Force.
La morphologie est corrélée avec la fonction.
b. Arrangement architectural des fibres à l'intérieur du muscle
Il est fonction de la jonction entre les fibres musculaires et les fibres tendineuses :
- "Bout à bout" : les muscles fusiformes (certains muscles larges, les muscles
larges et longs, comme le tibial antérieur).
- De manière latérale : les muscles penniformes, ou pennés (concerne la
majorité des muscles).
Les muscles pennés peuvent être :
- Unipennés

- Bipennés (gastrocnémien)
- Multipennés (deltoïde)
Un muscle penné développe plus de force qu'un muscle fusiforme : il présente, pour une
même section transversale, plus de fibres qu'une muscle fusiforme :
<
L'angle de pennation (angle entre la fibre musculaire et la fibre tendineuse) : plus l'angle
est fermé, plus la force développée est importante. L'angle de pennation n'excède pas 13°
au niveau du corps humain, et reste un aspect minoritaire, comparativement au nombre de
fibres dans une section transversale (car alors, pour un muscle fusiforme, l'angle de
pennation est nul...).
Plus un muscle est long, et plus sa vitesse de contraction sera grande (augmentation de
l'amplitude de raccourcissement).
Cet arrangement architectural du muscle influence les paramètres mécaniques qui décrivent la
contraction : paramètres cinétiques (force) et paramètres cinématiques (déplacement, vitesse
et accélération).
c. Mode d'insertion
La plupart des muscles de la motricité s'insèrent directement sur le squelette, et ce par
l'intermédiaire de tendons. La transmission de la force produite par le corps musculaire se fait
sans décrément : il y a continuité (les tissus conjonctifs se continuent dans le tendon) et
contiguïté (les fibres sont collées au tendon) de la jonction musculo-tendineuse.
Il existe une corrélation positive entre le diamètre du muscle et la force développée (5 à 10
kg/cm² de section). La faculté d'un tendon à supporter une tension est liée à sa section :
attention à l'hypertrophie trop rapide !
La rupture tendineuse intervient pour un allongement de 5% de la longueur initiale.
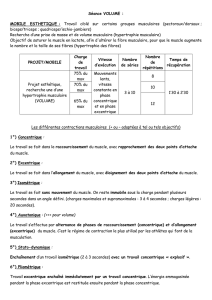
5- Les différents régimes de contraction
Isométrie
Anisométrie : le concentrique et l'excentrique. Ce régime de contraction peu également
être précisé :
- Contraction anisotonique ou isotonique (contraction à tension
intramusculaire variable ou constante).
- Contraction anisocinétique ou isocinétique (contraction à vitesse variable
ou constante).
IV. COMPORTEMENT MECANIQUE DU SYSTEME MUSCULAIRE
Fibre musculaire et muscle
Fig. 5 : la loi du tout ou rien, au niveau de la fibre musculaire, lorsque l'intensité du stimulus
augmente. Soit elle ne répond pas, soit elle répond (au maximum).
Fig. 6 : au niveau du muscle, la réponse est proportionnelle au nombre de fibres recrutées.
La secousse musculaire
C'est le résultat d'une stimulation brève que l'on applique sur le muscle. On a une phase sans
réponse du muscle, puis une phase ascendante et une phase descendante. Le temps de latence
correspond au temps nécessaire pour la mise en place de la contraction (libération du Ca2+).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%