transparents - LISIC

Introduction à la programmation // sur GPUs
en CUDA et Python
Denis Robilliard
Équipe CAMOME: C. Fonlupt, V. Marion-Poty, A. Boumaza
LISIC — ULCO
Univ Lille Nord de France
BP 719, F-62228 Calais Cedex, France
Email: [email protected]
Séminaire LISIC 19/05/2011
Denis Robilliard Introduction à la programmation // sur GPUs en CUDA et Python Séminaire LISIC 19/05/2011 1 / 24

Introduction
Cadre de l’exposé
Historique : suite à l’exposé de François Rousselle du 17 février 2011
Objectif : présenter quelques bases de la programmation // sur GPU
Matériel : machine "baru" 8 cartes Tesla C2050, fabricant Nvidia
Langages : CUDA (seulement sur matériel Nvidia), Python
Application : "les nombres de Schur", problème de combinatoire
Note
On ne s’intéressera pas aux aspects calculs pour le graphisme
Denis Robilliard Introduction à la programmation // sur GPUs en CUDA et Python Séminaire LISIC 19/05/2011 2 / 24


Architecture matérielle –1
Rappel
Valable uniquement pour GPUs Nvidia post-2006 (GPU G-80 et suivants)
Modèle de programmation vu à travers le langage CUDA
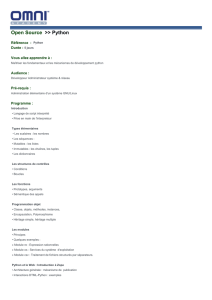
Schéma de l’architecture d’une carte (device) C2050
...
Device = x 14 multiprocessors = 448 cores
48 Ko Fast Shared RAM
Stream proc
/ Core
Registres
...
Multiprocesseur = x 32 cores
Stream proc
/ Core
Registres
...
48 Ko Fast Shared RAM
Stream proc
/ Core
Registres
...
Multiprocesseur = x 32 cores
Stream proc
/ Core
Registres
2 Go Global RAM
Denis Robilliard Introduction à la programmation // sur GPUs en CUDA et Python Séminaire LISIC 19/05/2011 4 / 24

Architecture matérielle –2
Constitution d’un multi-processeur : les cœurs
Un cœur (core /stream processor) a son propre jeu de registres
Un multiprocesseur = 32 cœurs + 48 Ko de mémoire partagée rapide
(aussi rapide que les registres — accès en 4 cycles)
Ils accèdent tous à la mémoire globale de la carte (2 Go — accès en 400
cycles)
Les 32 cœurs d’un multiprocesseur sont en SIMD (Single Instruction,
Multiple Data) : même instruction "en même temps", potentiellement sur
des données différentes
Cas des structures conditionnelles : tous les cœurs ne doivent pas
forcément faire la même chose ⇒certains cœurs seront oisifs (idle) et on
parle de divergence (= perte d’efficacité)
Denis Robilliard Introduction à la programmation // sur GPUs en CUDA et Python Séminaire LISIC 19/05/2011 5 / 24
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%