enonce projet

Projet d’introduction à l’analyse numérique :
Etude de la dynamique d’une centrale hydroélectrique
Premier Bachelier en sciences de l’ingénieur
Année académique 2012-2013
1 Introduction
Parmi les systèmes mis au point par l’homme, les réseaux d’énergie électrique se distinguent
par leur très grande taille et la complexité de leur fonctionnement. Il faut maintenir à tout instant
l’équilibre entre la puissance électrique produite et la puissance consommée 1, l’énergie électrique ne
pouvant être stockée en grande quantité. De plus, les systèmes d’énergie électrique sont soumis à de
nombreuses perturbations : variation continue de la demande, incidents climatiques (tels les coups
de foudre) ou encore des interventions humaines. L’accroissement de la production à base d’énergies
renouvelables (éoliennes, panneaux photovoltaïques, production hydroélectrique) et les contraintes
sociétales limitant les possibilités de développement du réseau par la construction de nouvelles lignes
de transport rend l’exploitation et la conduite de ces systèmes plus complexes.
En dépit de ces multiples facteurs, les réseaux électriques modernes fonctionnent avec une grande
fiabilité. Cependant, si les grandes défaillances de ces systèmes ou “black-outs” sont rares, leurs
conséquences sont très lourdes pour la société. C’est pourquoi les centres de conduite ou “dispat-
chings” sont dotés de logiciels capables de mesurer la robustesse du réseau face à des aléas et propo-
ser si nécessaire des mesures curatives. Au coeur de ces outils, on trouve des logiciels de simulation
numérique du fonctionnement dynamique du système.
Dans ce projet, nous considérons un modèle simplifié d’une centrale hydroélectrique dimension-
née pour produire une puissance nominale PNégale à 500 MW 2et connectée à un réseau de transport
d’énergie électrique à haute tension au moyen d’un transformateur.
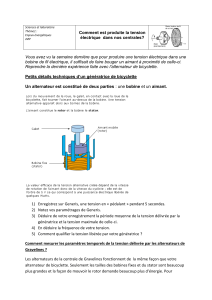
L’énergie électrique est obtenue par conversion de l’énergie potentielle liée au dénivelé d’une
chute d’eau d’eau en électricité. Au passage dans une turbine, l’énergie associée au courant d’eau sous
forme d’énergie cinétique et/ou de pression est transformée en énergie mécanique, puis en énergie
électrique par un alternateur.
Les principaux composants du modèle - la conduite d’eau, la turbine, l’alternateur, le transforma-
teur et la ligne de transport à très haute tension - sont indiqués sur le schéma illustratif de la figure 1.
2 Modèle
La conversion d’énergie mécanique en énergie électrique réalisée par l’alternateur repose sur le
phénomène d’induction électromagnétique régi par les lois de Faraday et Lenz. Un circuit soumis à
une induction magnétique variable est le siège d’une force électromotrice (f.e.m.) donnée par :
E=−dψ
dt
1. Ce qui inclut celle dissipée sous forme de pertes Joule
2. 1 MW=106W
1

FIGURE 1 – Schéma simplifié d’une centrale hydroélectrique.
(http ://rascol.free.fr/2A_99_2000/hydro/les_centrales_hydro.htm)
où ψest le flux d’induction magnétique ~
Bembrassé par le circuit. Si le circuit est fermé et conducteur,
il est le siège d’un courant induit.
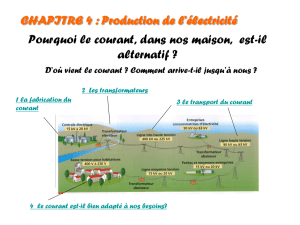
L’alternateur utilisé dans une centrale hydroélectrique est un générateur synchrone triphasé consti-
tué, comme indiqué à la figure 2, d’un élément mobile, le rotor, et d’un élément fixe, le stator. Le rotor
est un électroaimant et joue le rôle de l’inducteur. Son bobinage, appelé enroulement d’excitation, est
alimenté par une source de tension continue. Le stator joue le rôle de l’induit ; il est constitué de trois
enroulements décalés spatialement l’un par rapport à l’autre d’un angle de 2π/3.
En régime établi, le rotor est entraîné par la turbine et tourne à la vitesse angulaire ωNappelée
vitesse de synchronisme. Le champ magnétique créé par le rotor tourne à la même vitesse et, confor-
mément à la loi de Faraday, engendre dans chaque enroulement statorique une f.e.m. alternative de la
forme :
E=√2Ecos(ωNt+θ)
où Eest appelé valeur efficace de la f.e.m. et θla phase. Remarquons que la pulsation de la f.e.m. et
aussi des courants induits dans les circuits statoriques est égale à la vitesse angulaire du rotor.
Etant donné le décalage de 2π/3entre les trois enroulements, les trois f.e.m. générérées sont
de même amplitude mais déphasées d’un tiers de période l’une par rapport à l’autre. L’alternateur
alimente trois circuits ou phases, supposés identiques. L’étude de ce type de fonctionnement, dit
triphasé équilibré, peut se ramener à celle d’une seule des trois phases.
Le modèle dynamique simplifié décrit ci-après s’écrit sous la forme de six équations différen-
tielles ordinaires qu’il faudra traiter numériquement. A l’exception de la vitesse angulaire ω(rad/s),
de la position du rotor δ(rad) et du temps t(s), les autres variables et paramètres apparaissant dans
ces équations sont adimensionnels. A cette fin, chaque grandeur a été rapportée à sa valeur dite “de
base” et s’exprime donc comme fraction de celle-ci. Considérons par exemple le cas de la puissance
produite par le générateur : la valeur de base utilisée étant la puissance PN= 500 MW, une production
2

FIGURE 2 – Alternateur triphasé.
(http ://fi26.bulot-fr.com/wiki/index.php?title=Machine_Synchrone)
de 400 MW correspond à une valeur adimensionnelle :
P= 400/500 = 0.8.
2.1 Equations de mouvement du rotor
Les deux premières équations différentielles expriment la loi de Newton appliquée au mouvement
du rotor.
Le rotor reçoît un couple mécanique Tmde la turbine tandis que l’interaction entre les courants
circulant dans les enroulements développe un couple de rappel dit “électromagnétique” Te. En fonc-
tionnement établi, c’est-à-dire à l’équilibre, les deux couples sont de même amplitude et de sens
opposés de sorte que le rotor n’est ni accéléré ni décéléré mais tourne à la vitesse de synchronisme
ωN. En fonctionnement perturbé, par exemple suite à une augmentation de la puissance fournie par
la turbine, dans les premiers instants la vitesse angulaire ωs’écarte de la vitesse de synchronisme
ωN. Ensuite, sous l’effet des couples, le rotor “oscille” autour de sa position d’équilibre. La position
relative du rotor est définie par l’angle δqui représente la position d’un repère solidaire du rotor par
rapport à un référentiel qui tourne à la vitesse angulaire de synchronisme ωN. On écrit :
dδ
dt =ω−ωN(1)
1
ωN
dω
dt =ωN
2H(Tm−Te)(2)
où Hest une constante représentative de l’inertie du rotor.
2.2 Turbine
La puissance mécanique fournie par la turbine est fixée par le degré zd’ouverture des vannes
d’admission de l’eau dans la conduite. Une valeur z= 1 correspond à la production de la puissance
3

nominale PN.
Lorsque l’on modifie l’ouverture des vannes z, le débit d’eau Qdans la conduite n’atteint pas ins-
tantanément sa nouvelle valeur d’équilibre car la masse d’eau a une inertie. L’équation différentielle
qui traduit cette variation dynamique s’écrit :
1
ωN
dQ
dt =1
Tw 1−Q
z2!(3)
où Twest appelé le “temps de démarrage de l’eau” et représente le temps mis par l’eau pour atteindre
sa vitesse nominale en partant du repos. Comme indiqué précédemment, dans cette équation, Q,zet
Twsont adimensionnels.
La puissance mécanique est donnée par :
Pm=Q−QV
1−QVQ
z2
(4)
où QVtraduit les “pertes de charges”, la puissance mécanique recueillie par la turbine est en effet
inférieure à la puissance totale cédée par l’eau. Une partie est perdue en frottements de l’eau avec la
conduite et la turbine.
On déduit le couple mécanique Tm=ωN
ωPm. En variables adimensionnelles, on tire de (4) :
Tm=ωN
ωQ
z2Q−QV
1−QV
.(5)
2.3 Partie électromagnétique
L’alternateur délivre une tension et un courant alternatifs aux bornes du réseau auquel il est
connecté. Ces grandeurs dépendent non seulement des flux d’induction magnétiques existant au stator
et au rotor de l’alternateur mais aussi des paramètres du réseau R, de la ligne de transport à haute
tension et du transformateur.
Dans le modèle simplifié considéré, la ligne et le transformateur sont simplement représentés par
une réactance équivalente Xe=ωNLe.
Le système électrique se met sous la forme indiquée à la figure 3. Comme indiqué précédemment,
on n’étudie qu’une seule des trois phases. Le réseau Rest supposé présenter une tension alternative
d’amplitude constante et est représenté par une source de tension équivalente délivrant la tension
d’amplitude VR, tandis que Vest l’amplitude de la tension délivrée par l’alternateur. La relation entre
ces deux tensions peut être obtenue par application des lois de Kirchhoff.
D’autre part, le circuit modélisant l’enroulement d’excitation installé sur le rotor est donné à la
figure 4 ; vfreprésente la source continue d’alimentation du circuit, Rfla résistance du circuit, ψf
le flux d’induction magnétique embrassé par l’enroulement et ifle courant le parcourant. La relation
entre ces grandeurs s’écrit :
vf=Rfif+1
ωN
dψf
dt (6)
On montre que la chute de tension Rfifpeut se calculer comme suit à partir des variables δet
ψf:
Rfif=Xe+Xd
T0
d0(Xe+X0
d)ψf−Xd−X0
d
Xe+X0
d
VRcos δ(7)
4

VR
V
Alternateur Réseau R
+
-
+
-
Xe
FIGURE 3 – Modèle de la partie électrique
+
−
if1
ωN
dψf
dt
Rf
vf
FIGURE 4 – Modèle du circuit d’excitation
où Xd,X0
d,T0
d0sont des paramètres caractéristiques de l’alternateur, fournis par le constructeur.
En plus de l’enroulement d’excitation, le rotor est également pourvu d’un circuit d’amortisse-
ment (fermé sur lui-même) dit “enroulement d’amortissement”. En régime établi, les inductions ma-
gnétiques sont fixes par rapport au rotor, le flux d’induction magnétique est constant et le circuit
d’amortissement n’est parcouru par aucun courant. En présence d’oscillations du rotor, par contre, un
courant est induit dans cet enroulement et, en vertu de la loi de Lenz, ce courant tend à s’opposer
à la cause qui le crée. Cela donne lieu à un couple de rappel supplémentaire qui tend à amortir les
oscillations du rotor (d’où le nom du circuit en question). Le circuit correspondant est donné à la
figure 5 ; ψq1représente le flux d’induction magnétique embrassé par l’enroulement et iq1le courant
le parcourant. La relation entre ces grandeurs s’écrit :
Rq1iq1+1
ωN
dψq1
dt = 0 (8)
avec Rq1la résistance du circuit.
1
ωN
dψq1
dt
iq1
Rq1
FIGURE 5 – Modèle du circuit d’amortissement
Après calculs, l’expression de la chute de tension Rq1iq1est :
Rq1iq1=Xe+Xq
T0
q0(Xe+X0
q)ψq1−Xq−X0
q
Xe+X0
q
VRsin δ(9)
où Xq,X0
q,T0
q0sont des paramètres caractéristiques de l’alternateur, fournis par le constructeur.
5
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%