DISQUETTE PROGRAMME DU TSX 17 TRANSGERBEUR LABEC

DISQUETTE PROGRAMME
DU TSX 17
TRANSGERBEUR LABEC
TRANSGERBEUR COMPLET
Dans le répertoire TSX17
Ce programme est conforme aux documents de câblage fournis dans le DOSSIER
TRANSGERBEUR édité par le CRDP MIDI PYRENEES.
RAPPEL:
De petites modifications ont été apportés par rapport au câblage initial du
Transgerbeur LABEC.
AXE-Z SEUL
Dans le répertoire TSX 17_ Z
Voir aussi les documents suivants

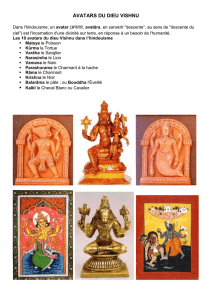
Schématisation et caractéristiques de l'axe Z
PR Poulie réceptrice: diamètre 70 mm
CH Chariot mobile: masse m1 = 18 kg à vide.
La masse transportée est comprise entre 0 et 10 kg.
PM Poulie motrice: diamètre 70 mm
R Réducteur de vitesse mécaniquement réversible: rapport 1/ 20
M Moteur à courant continu
F Frein à manque de courant
DT Génératrice tachymétrique: K = 6 mV / tr.mn-1
A Accouplement souple des axes
C Codeur rotatif absolu multitours


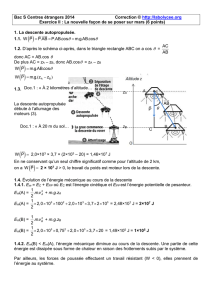
La vitesse nominale en montée
ou en descente peut être obtenue
par n incrémentations de la
valeur K 1 ou K2 espacées d'un
temps Dt.
Pour faire varier la pente d'accélération
on peut agir soi t sur Ie paramètre K 1
pour la montée et K2 pour la descente
soit sur le temps élémentaire Dt
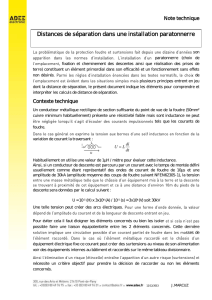
Asservissement de vitesse et de position de l'axe Z
ACCÉLÉRATION Loi de commande - Paramétrage
On désire une vitesse d’ accélération proportionnelle au temps
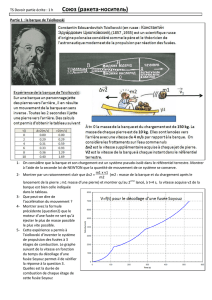
DECELERATION On désire un ralentissement tel qu'à partir du point de ralentissement
choisi, la vitesse décroisse proportionnellement à l'espace restant à
parcourir jusqu'au point d'arrêt.
Pour élaborer cette loi,
l'automate calcule en
permanence la distance
Pa - Pc que l'on compare
à la distance de freinage
en montée K4 ou en des-
cente K5.
Si Pa-Pc > K4 ou K5 alors
maintenir Vnm ou Vnd
Si Pa-Pc < K4 ou K5 alors
faire Vc = Vnm [(Pa-Pc)/K4]
ou Vc = Vnd [(Pa - Pc)/KS]
si Pa-Pc = O alors maintenir
Vc = O
W0: Pc Position courante axe Z
Wl: Pa Position à atteindre
W4: Vc Vitesse courante axe Z
W5: Vam Vitesse attelnte en montée
W6: Vad Vitesse atteinte en descente
Mots variables
VARIABLES AUTOMATE CONCERNEES
CWO: Po Position initiale Axe Z
CWl: K 1 Incrément de vitesse en montée
CW2: K2 Incrément de vitesse en descente
CW3: K3 Vitesse réduite
CW4: K4 Dlstance de frelnage en montee
CW5: K5 Distance de freinage en descen'e
CW6: Vnu Vitesse nulle
CW7: Vnm Vltesse nommale en montee
CW8: Vnd Vitesse nominale en descente
CW9: Vmanu Vitesse en marche manu
CW10: Position haute axez
Mots constants

 6
7
6
7
1
/
7
100%