CHAPITRE 11 : MOUVEMENTS PLANS

TERMINALE S – CHAPITRE 11
1/11
CHAPITRE 11 : MOUVEMENTS PLANS
I. DE QUOI ON PARLE
On étudiera dans ce chapitre des mouvements à deux dimensions, avec l’exemple des
corps soumis à la force de gravitation. Nous verrons plus précisément les cas du
projectile dans un champ de pesanteur et de l’orbite des planètes et des satellites.
II. PROJECTILE DANS UN CHAMP DE PESANTEUR UNIFORME
1. Hypothèses
• Le champ de pesanteur est uniforme (dimensions Rterre)
• Objet dense par rapport au milieu :
fluide fluide fluide
VVmm P
ρ
ρρρ
⇔⋅ ⋅⇔ ⇔ Π
La poussée d’Archimède est donc négligeable par rapport au poids du projectile.
• Vitesses faibles (v∼quelques m/s) et objet profilé (balle, javelot …) afin que le
frottement fluide soit aussi négligeable devant le poids.
La seule force agissant sur le projectile est donc son poids : c’est l’étude d’un
mouvement de chute libre dans un champ de pesanteur uniforme
2. Théorème du centre d’inertie
Dans le référentiel terrestre supposé galiléen :
La seule force appliquée au projectile sur l’objet est son poids, la deuxième loi de
Newton s’écrit donc : ma mg⋅= ⋅ ⇒
ag
=
L’accélération est donc constante au cours du mouvement, comme dans le cas de la
chute libre verticale : le mouvement est uniformément accéléré. Soulignons de plus
qu’elle est indépendante de la masse de l’objet : la masse du projectile n’influe pas
sur sa trajectoire.
g
P
m G

TERMINALE S – CHAPITRE 11
2/11
3. Conditions initiales, choix des axes
En plus des lois de Newton, nous avons besoin des conditions initiales du
mouvement : quelles sont la position et la vitesse du projectile à l’instant initial ?
Si on introduit un repère
()
,,,Oi jk
orthonormé, ces conditions s’expriment à l’aide
des 6 nombres obtenus par projection des vecteurs sur 3 axes orthogonaux :
0000
00 0 0
x
yz
OG x i y j z k
vvivjvk
=++
=++
Orientons l’axe z vers le haut, de manière à ce que que le champ de pesanteur lui
soit colinéaire : ggk=− ⋅
Nous avons la liberté d’orienter les vecteurs i
et
j
des axes x et y dans le plan
orthogonal à k
: on le fait de telle sorte que la coordonnée x de la vitesse initiale 0
v
soit nulle : 00
x
v=. On a alors en notant
α
l’angle
(
)
0
,iv
:
() ()
00 0 0 0
cos sin
yz
vvjvkv jv k
αα
=+= +
Nous avons aussi le choix de la position de l’origine O arbitraire du repère, nous la
choisissons telle que le centre d’inertie du projectile soit à l’origine O à l’instant
initial :
00OG
=
4. Equations horaires
Projetons maintenant le théorème du centre d’inertie sur ces trois axes afin d’obtenir
trois équations différentielles pour les trois composantes de la vitesse :
d
d
d0
d
d0
d
d
d
x
y
z
v
at
v
t
v
t
vg
t
agk=
⎧=
⎪
⎪
⎪=
⎨
⎪
⎪
=
−
⎪
⎩
=− ⋅ ⇒
• La première équation donne par intégration : 0
cte 0
xx
vv
=
==
La vitesse suivant x est donc nulle au cours du mouvement. La coordonnée x
du projectile est une primitive de vx : 0
cte 0
x
x
=
==
α
y
x
z
g
O
0
v
0y
v
0z
v

TERMINALE S – CHAPITRE 11
3/11
Elle est donc nulle tout au long du mouvement : le mouvement se fait
intégralement dans le plan
()
0x
=
: le mouvement est plan.
• La deuxième équation donne par intégration :
0
0coscte
yy
vvv
α
=
==
La composante suivant y de la vitesse est donc constante. La coordonnée y du
projectile est une primitive de vy :
(
)
(
)
000
cos cosyv ty v t
α
α
=×+=×
• Intégrons enfin la troisième équation (qui est l’équation de la chute libre
verticale) :
00
sin
zz
vgtv gtv
α
=
−⋅+ =−⋅+
La coordonnée z du projectile est donc :
()
20
1sin
2
zgtv t
α
=
−⋅+ ×
On a obtenu les équations d’évolution des coordonnées y et z du projectile,
paramétrées par le temps :
()
()
0
20
cos
1sin
2
yv t
zgtv t
α
α
=×
=− ⋅ + × (et x=0)
Le mouvement du centre d’inertie du projectile est donc la composition d’un
mouvement rectiligne uniforme suivant l’axe y et d’un mouvement de chute libre
verticale suivant l’axe z.
5. Equation de la trajectoire
On isole t dans la première équation et on injecte son expression t = f(y) dans la
deuxième :
2
0
0
00
0
1sin
2
cos
cos cos
y
yy
zg v z
tv
vv
α
α
αα
⎧
⎪
⎪
⎨⎛⎞ ⎛⎞
⎪×
⎜⎟ ⎜⎟
⎪⎝⎠ ⎝⎠
⎩=− + +
=
En simplifiant :
()
2
22
0tan
2cos
g
zyy
v
α
α
=− + ×
C’est l’équation d’une parabole : un mouvement de chute libre est donc parabolique.
Cette équation contient moins d’information que le système obtenu plus haut : elle
renseigne sur les positions occupées par le projectile mais pas sur les dates aux
différents points.

TERMINALE S – CHAPITRE 11
4/11
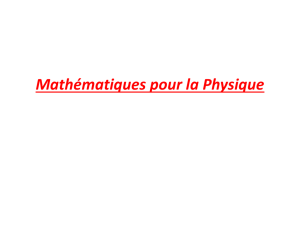
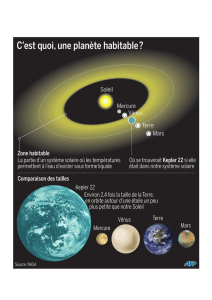
6. Importance des conditions initiales
Les caractéristiques exactes du mouvement dépendent fortement des conditions
initiales sur la vitesse v0 et
α
(ou de manière équivalente vx et vy, ou 0
v
). Le graphe ci-
dessous montre par exemple différentes trajectoires pour une même valeur de la
vitesse initiale mais une inclinaison différente par rapport à l’horizontale :
III. MOUVEMENT DES PLANETES ET DES SATELLITES
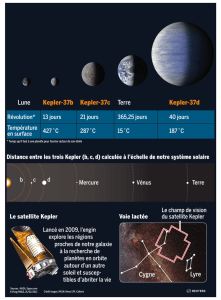
1. Lois de Kepler
Les lois qui régissent le mouvement des planètes ont été découvertes
expérimentalement par l’autrichien Johanes Kepler, en s’aidant des relevés très précis
des positions des astres de l’astronome danois Tycho Brahé (qui lui croyait
fermement à une Terre immobile au centre de l’Univers).
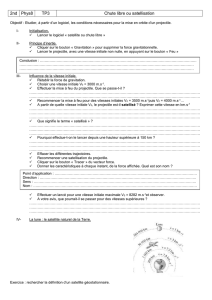
• 1e loi de Kepler : loi des ellipses
Les trajectoires des planètes autour du Soleil sont des ellipses, dont l’un des foyers
est occupé par le Soleil.
Ellipse : cte 2FM MF a+==
′
a : demi-grand axe
b : demi-petit axe
pour un cercle : a = b = r
a
b
F
F’
M
60°
45°
80
°
20°

TERMINALE S – CHAPITRE 11
5/11
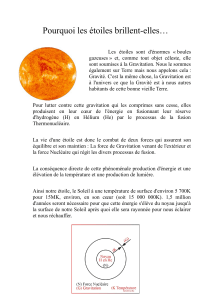
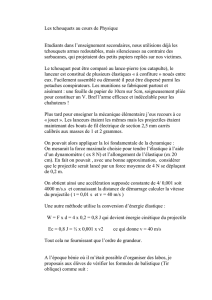
• 2e loi de Kepler : Loi des aires
Le rayon vecteur SM
balaye des surfaces égales en des durées égales.
Ainsi, la planète M met la même durée pour parcourir les portions CD et EF de
son orbite si les aires SCD et SEF sont égales. La vitesse de la planète est donc
plus élevée lorsqu’elle est proche de l’étoile.
• 3e loi de Kepler
Le rapport du carré de la période de révolution de la planète sur le cube du demi-
grand axe de l’orbite est le même pour toutes les planètes, il ne dépend que de la
masse de l’étoile. 2
3cte
T
a=
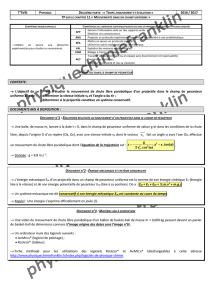
2. Force de gravitation
Comme on l’a vu au chapitre 10 :
/2B
A
AB mm
FG u
d
⋅
=−
3. Mouvement circulaire uniforme
Souvent, il est possible en première approximation de considérer que la trajectoire
des planètes et des satellites est circulaire. La loi des aires indique que, dans ce cas, le
mouvement est uniforme. Nous nous concentrerons dans la fin de ce chapitre sur ce
mouvement particulier.
3.1. Accélération
Lors d’un mouvement circulaire uniforme, l’accélération est :
• radiale (sa direction est confondue avec le rayon du cercle)
• centripète (de sens vers le centre du cercle)
• de valeur constante égale à 2
avR
=
A
mA
B
mB
A
B
F
AB
uAB
=
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%