pdf-retards

J.P. Richard, « Système Dynamiques » - Master SMaRT Lille 1 & EC Lille, 2010-2011
1
Systèmes à retards
Jean-Pierre Richard
LAGIS – CNRS FRE 3303
&
projet ALIEN – INRIA
Ecole de Printemps
« Mathématiques pour la R&D »
Djerba, Tunisie, 22-25 mars 2009
http://chercheurs.lille.inria.fr/~jrichard
jean-pierre.richard@ec-lille.fr
SMaRT 2010-2011
Part 2
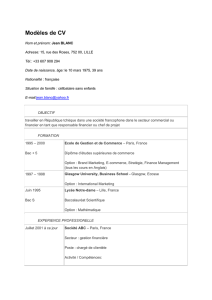
Retard : exemple classique
Modèles de type Strejć-Broïda pour la commande industrielle
usage fréquent en génie des procédés
approximation simple et générique
commande PID ? ... marche mal si T >
τ
prédicteur de Smith ou «GPID »
Exemple du GV LAGIS
T
chauffe
+
transfert thermique

J.P. Richard, « Système Dynamiques » - Master SMaRT Lille 1 & EC Lille, 2010-2011
2
Retard : autre exemple classique
... un grand classique des TP d’automatique (Feedback)
T
PID ok
T
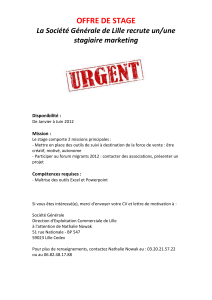
Retard : autre exemple classique
Pendule simulé, réseau réel Pendule réel, réseau réel
But : synchronisation d’un pendule
esclave (Nantes) sur un pendule maître
(Ensenada).
yref supposée connue par les deux.
Stratégie :
1) buffers à 300ms =
τ
2) commande tq écart m/e régi par :
commande causale
© Estrada-Garcia 2008
Thèse H.J. Estrada-Garcia 2008 (+Moog, Marquez-Martinez)
UDP
Retard : autre exemple classique

J.P. Richard, « Système Dynamiques » - Master SMaRT Lille 1 & EC Lille, 2010-2011
3
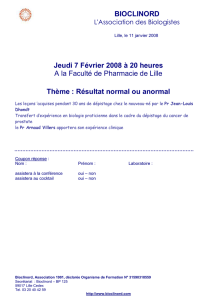
1) an applied topic,
2) an already old topic
[Smith 1959],
but, also...
a contemporary
research topic
5 among the hottest 9
http://top25.sciencedirect.com/subject/engineering/12/journal/automatica/00051098/archive/29/
ELSEVIER AUTOMATICA Top 10 Cited (articles published in the last five years)
Extracted from Scopus (on Sun Oct 31 20:08:05 GMT 2010)
•Network-based robust H∞ control of systems with uncertainty 325
Volume 41, Issue 6, 2005, Pp 999-1007
Yue, D. | Han, Q.-L. | Lam, J.
•Delay-range-dependent stability for systems with time-varying delay 212
Volume 43, Issue 2, 2007, Pp 371-376
He, Y. | Wang, Q.-G. | Lin, C. | Wu, M.
•Delay-dependent stabilization of linear systems with time-varying state and input delays 181
Volume 41, Issue 8, 2005, Pp 1405-1412
Zhang, X.-M. | Wu, M. | She, J.-H. | He, Y.
•Stabilization of linear systems over networks with bounded packet loss 156
Volume 43, Issue 1, 2007, Pp 80-87
Xiong, J. | Lam, J.
•Stability and L2-gain analysis for switched delay systems: A delay-dependent method 149
Volume 42, Issue 10, 2006, Pp 1769-1774
Sun, X.-M. | Zhao, J. | Hill, D.J.
•Bilateral teleoperation: An historical survey 148
Volume 42, Issue 12, 2006, Pp 2035-2057
Hokayem, P.F. | Spong, M.W.
•A new delay system approach to network-based control 139
Volume 44, Issue 1, 2008, Pp 39-52
Gao, H. | Chen, T. | Lam, J.
•Absolute stability of time-delay systems with sector-bounded nonlinearity 132
Volume 41, Issue 12, 2005, Pp 2171-2176
Han, Q.-L.
•Robust integral sliding mode control for uncertain stochastic systems with time-varying delay 112
Volume 41, Issue 5, 2005, Pp 873-880
Niu, Y. | Ho, D.W.C. | Lam, J.
9 among the
last 5 years top 10 !

J.P. Richard, « Système Dynamiques » - Master SMaRT Lille 1 & EC Lille, 2010-2011
4
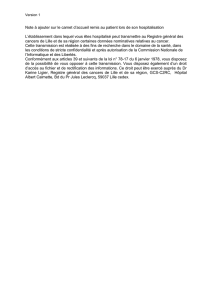
Much a do about delay ?
• problème appliqué (biblio : cf. Niculescu 01, Richard 03)
(ingénierie, télécom., temps réel, aéronautique, biologie, populations, etc.)
retard
• problème toujours ouvert dans de nombreux cas
(bouclage, retards variables, retards inconnus, identification, etc.)
• problème de dim. infinie «le plus simple»
(équations fonctionnelles = cas particulier des EDP )
• problème à surprises
(dégradation/amélioration par ajout de retard, modèle d’échantillonnage, etc.)
h
h
t
x
h
t
x
Plan du cours
- classification (et exemples 5, 6, 7...)
- problème de Cauchy
- stabilité
- formalismes (modèles)
- commande (et commandabilité)
- petite bibliographie
- motivations
- 1er exemple (télé-op.) notions de base (stabilité, état, dimension infinie)
- 2ème exemple : retard variable contre-exemple
- 3ème exemple : échantillonnage asynchrone intérêt
- 4ème exemple : Networked Control System (maître-esclave via réseau)
Particularités des SàR
Généralités mathématiques

J.P. Richard, « Système Dynamiques » - Master SMaRT Lille 1 & EC Lille, 2010-2011
5
Particularités
Un 1er exemple simple
moteur
tension uangle mesuré x
angle voulu
x= 0 +-
écart
ε= 0 – x
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
1
/
47
100%