Demosciences 2017

Activités proposées par :
Marc Derumaux, professeur au lycée St Louis,
Damien Iceta, professeur au lycée Gustave Eiffel,
Florent Le Bourhis, professeur au lycée Janson de Sailly,
Gilles Moissard, professeur au lycée Janson de Sailly,
David Violeau, professeur au lycée Janson de Sailly
Démosciences
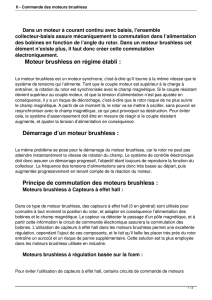
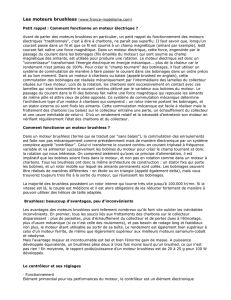
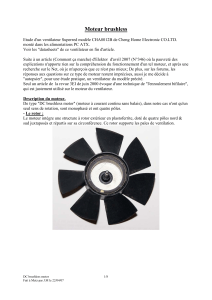
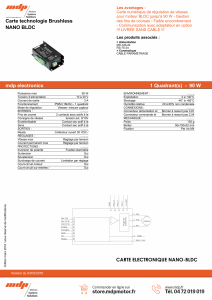
Les moteurs brushless

L'ambition du stand Démosciences
2009 – 2017,
Stand Bénévole,
Sous forme de mini-TP
Objectif :
●Proposer des animations en marge de nos enseignements,
permettant de s'approprier des compétences transversales.
●Se faire plaisir !

L'ambition du stand Démosciences
STI – Sciences et Techniques Industrielles, une discipline qui
évolue avec les technologies.
Les systèmes tendent vers du pluritechnique : tirer parti des
compétences de chacun pour gagner en transversalité.
L'UPSTI soutient les professeurs dans leur démarche de veille
technologique et pédagogique.

Démosciences 2017 :
Les moteurs Brushless
Les technologies des actionneurs évoluent ; le moteur CC est
progressivement remplacé par des moteurs Brushless.
La machine synchrone est arrivé au programme de PT et au
programme de physique de PSI...

Démosciences 2017 :
Les moteurs Brushless
Les catégories de moteurs...
Moteur à
courant continu
Moteur Electrique Moteur
universel
Moteur à
courant alternatif
Moteur
Asynchrone
Moteur
Synchrone
Moteur
synchrone
auto-piloté
Moteur
Brushless
BLDC
Moteur
BLDC
sans capteur
Moteur
BLDC
avec capteurs
Moteur
pas à pas
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%