Lycée du Parc Exercice 1 : Correction de tilt d`une optique adaptative

Cours - Cycle 2
Chap1 : Modélisation des SLCI 1
Lycée
du Parc
Cycle 2 Analyser, expérimenter, modéliser et résoudre pour vérifier
les performances temporelles et fréquentielles des SLCI
PSI
Sciences
Industrielles
de l’Ingénieur
CHAPITRE 1 : MODELISATION DES SYSTEMES LINEAIRES
CONTINUS ET INVARIANTS
TD
Exercice 1 : Correction de tilt d’une optique adaptative
Concours Mines Ponts 2001
L’objectif de l’étude est de déterminer la fonction de transfert en boucle ouverte du système
de correction de tilt d’une optique adaptative à partir de modèles de connaissances afin de
pouvoir par la suite étudier les performances du système.
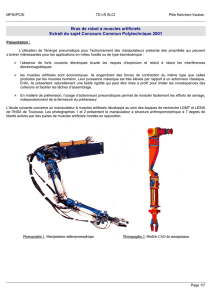
En instrumentation astronomique, un
système d’optique adaptative (OA) permet
de corriger les effets des turbulences de
l’atmosphère. Celles-ci provoquent des
fluctuations aléatoires de l’indice de
réfraction des couches de l’atmosphère
traversées par la lumière, et sont à l’origine
des déformations des surfaces d’onde
reçues par le télescope. Il en résulte non
seulement une déformation instantanée des
images, mais également un « flou » dû aux
variations de la surface d’onde pendant le
temps de pose. La Figure 1 compare deux
images du centre galactique prises dans
l’infrarouge, l’une sans correction (à gauche), l’autre avec correction par la première optique
adaptative astronomique : le système « Pueo » du télescope Canada-France-Hawaï.

Cours - Cycle 2
Chap1 : Modélisation des SLCI 2
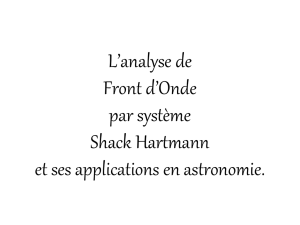
Le principe d’une optique
adaptative est le suivant : une
surface d’onde provenant de
l’objet astronomique et
déformée par l’atmosphère
est reçue par des miroirs
primaires puis secondaires
du télescope. La lumière est
séparée par une lame
dichroïque (un miroir
partiellement réfléchissant),
et envoyée pour partie sur
une caméra CCD où se
forment les images, pour
l’autre partie sur un analyseur
de surface d’onde (ASO).
Celui-ci fournit une estimation
de la déformation de la
surface d’onde. Un
calculateur temps-réel en
déduit les commandes à
appliquer aux actionneurs de
l’optique adaptative.
L’objet de l’étude est le sous système de correction du miroir tilt (Tip-Tilt Mirror, ou TTM) conçu
pour le VLT par le Département de Recherche Spatiale (DESPA) de l’Observatoire de Paris-
Meudon.
Le système de correction du miroir tilt est détaillé sur la figure de droite. Il comprend un
système mécanique supportant le miroir, deux moteurs actionnant le système mécanique, un
amplificateur de puissance, deux capteurs angulaires et diverses cartes électroniques
réalisant des soustractions ou des transformations des signaux.
Des études ont permis de proposer des modèles de comportement pour chacun des éléments
constituant le système :
le système mécanique peut-être modélisé par l’équation suivante :
2
2
dθ(t) J d θ(t) 1
θ(t) T C(t)
dt k dt k
où θ(t) est l’angle de rotation, C(t) est le couple moteur, k est la raideur du système
mécanique (k=24N.m/rad), T est une constante qui correspond à l’amortissement c du
système mécanique divisé par sa raideur k (T=10−3s) et J est l’inertie du système
mécanique (J=3,6.10−3kg.m2).
le moteur électrique, alimenté par une intensité i(t), est simplement modélisé par un
gain pur (K3=1,2 N.m/A).
l’amplification de puissance se comporte comme un gain pur (K2 = 0,1 A/V).
le capteur de position se comporte comme un gain pur (K4 = 4125 V/rad).
le correcteur PD (Proportionnel-Dérivé) est construit pour définir la loi d’entrée (notée
e5(t)) sortie (notée s5(t)) suivante :
5
5 5 5
5
de (t) 1
e (t) T s (t)
dt K

Cours - Cycle 2
Chap1 : Modélisation des SLCI 3
où T5 [s] et K5 [1] sont des constantes de réglage du système.
Le correcteur PI (Proportionnel-Intégral) est construit pour définir la loi d’entrée qui est
un écart (notée ε1(t)) sortie (notée e2(t)) suivante :
12
1 1 1 1
dε (t) de (t)
Kε (t) T T
dt dt
où T1 [s] et K1 [1] sont des constantes de réglage du système.
Q.1. Compléter le schéma-bloc ci-dessous.
Q.2. Modifier le schéma-bloc de la question précédente pour obtenir un schéma-bloc
comportant deux boucles imbriquées l’une dans l’autre comme sur le schéma ci-
dessous. Déterminer les fonctions de transfert HA(p), HB(p), HC(p) et HD(p).
Q.3. Déterminer la fonction de transfert en boucle ouverte de la boucle 1 : T1(p). Donner
la classe et l’ordre de cette fonction de transfert.
Q.4. Déterminer la fonction de transfert en boucle fermée de la boucle 1 : T1(p). Donner
la classe et l’ordre de cette fonction de transfert.
Q.5. Calculer la fonction de transfert boucle ouverte F(p) du système puis donner sa
classe.
Exercice 2 : Etude du mécanisme de transfert d'un
automate de préparation de pizza
Concours Petites Mines 2004
Les objectifs de l’étude sont :
- de déterminer la fonction de transfert en boucle fermé du mécanisme de transfert
- de proposer un modèle dans le domaine de Laplace de la consigne de déplacement en
vitesse de type trapézoïdale.

Cours - Cycle 2
Chap1 : Modélisation des SLCI 4
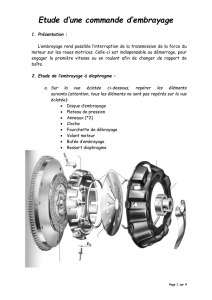
Le mécanisme de transfert est un ensemble mécanique appartenant à un automate de
préparation de pizza. Il permet de transférer sur un plateau, des dosettes contenant des
ingrédients nécessaires à la préparation des pizzas vers un robot préparateur, chargé lui de
vider ces dosettes, d’étaler la pâte de déposer la sauce tomate et le fromage…
Le mouvement de l’ensemble est décomposé en 3 phases :
Phase 1 : déplacement horizontal de la
dosette.
Phase 2 : rotation de la dosette autour de
l’axe vertical.
Phase 3 : mouvement d’élévation de la
dosette pour l’amener en face du préparateur.
La chaine cinématique assurant le
déplacement du chariot est constituée :
d’un moteur à courant continu, commandé en tension : um (t) tel
que
m
m m m m
dω (t)
ω (t) τ K u (t)
dt
,
d’un réducteur planétaire à 2 étages de rapport de réduction
r
m
ω (t) 11
ω (t) r 32
,
d’une transmission poulies-courroie crantée (diamètre primitif des poulies : Dp=35,6
mm) qui permet de déplacer en translation d’une vitesse v4(t) le chariot 4 afin d’élever
la dosette en phase 3 (v4(t)=Dp/2.ωr(t)).
d’un codeur incrémental, monté sur le moteur, qui permet de mesurer la vitesse ωm(t)
de l’arbre moteur. Le gain du capteur de vitesse sera assimilé à une constante Kmes et
délivre un sortie en tension notée umes(t). Ce choix permet de réaliser un
asservissement en vitesse du moteur.
D’une carte de commande d’axe qui reçoit la vitesse de consigne du chariot vc(t) et la
mesure de la vitesse de rotation du moteur u mes(t). Cette carte élabore :
- la tension de consigne uc(t) à l’aide d’un bloc d’adaptation de gain Ka,
- l’écart en tension ε(t),
- puis la commande en tension du moteur, à partir de l’écart ε(t) et d’un bloc correcteur
noté Kc.
Q.1. Tracer le schéma-bloc de la commande du chariot d’entrée Vc(p) et de sortie V4(p).
Préciser le constituant correspondant à chaque bloc. Indiquer les grandeurs physiques
qui transitent entre chaque bloc et leur unité.
Q.2. Déterminer l’expression littérale du gain d’adaptation Ka pour obtenir un
fonctionnement précis en régime permanent, de façon à annuler l’écart ε(t) quand la
vitesse du chariot et la vitesse de consigne sont égales.

Cours - Cycle 2
Chap1 : Modélisation des SLCI 5
Q.3. Calculer la fonction de transfert boucle fermée du système. La mettre sous forme
canonique puis donner la classe et l’ordre de cette fonction de transfert.
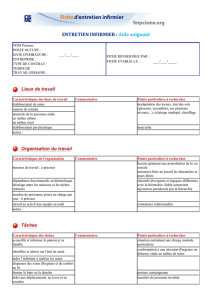
Le déplacement du chariot est commandé en trapèze de vitesse à deux niveaux :
- niveau 1 : déplacement grande vitesse GV = 0,5 m/s,
- niveau 2 : déplacement petite vitesse PV = 0,1 m/s.
La courbe ci-dessous représente (en gras) la vitesse de consigne du chariot vc(t) et (en trait
fin) la vitesse réelle du chariot v4(t) en m/s.
Q.4 Différentier les zones d’asservissement en régulation et celle en poursuite.
Q.5. Au début du mouvement (t < t1, avec t1 = 0,5 s), le chariot est commandé avec une
rampe de vitesse. En donner la transformée de Laplace Vc(p) en fonction de GV et t1.
Q.6. En utilisant le théorème du retard et en décomposant la commande en trapèze de
vitesse en une somme de rampes élémentaires, donner l’expression de la transformée
de Laplace Vc(p) pendant toute la durée du déplacement du chariot (0s<t<3s). (Les
pentes de toutes les rampes élémentaires ont la même valeur absolue
1
GV
t
.
 6
7
8
9
6
7
8
9
1
/
9
100%