TP Machine à Courant Continu + Hacheur 4 Quadrants

TP Machine à Courant Continu + Hacheur 4 Quadrants - 2ème année 2DA -2010-
Page 1 sur 5
T
TP
P
:
:
M
Ma
ac
ch
hi
in
ne
e
à
à
C
Co
ou
ur
ra
an
nt
t
C
Co
on
nt
ti
in
nu
u
+
+
H
Ha
ac
ch
he
eu
ur
r
4
4
Q
Qu
ua
ad
dr
ra
an
nt
ts
s
En raison du nombre de machines disponibles la plupart des tables seront occupées par des trinômes.
Le compte-rendu de ce TP contiendra les mesures et les caractéristiques utiles de la machine à courant
continu, des composants du Hacheur et de sa commande.
Objectifs
Le but de ce TP est l'étude d’un variateur de vitesse pour une machine à courant continu.
Présentation
Ce variateur de vitesse est constitué d’une alimentation continue (pont redresseur PD3 intégré à la
table) et d'un hacheur 4 quadrants (2 bras de pont) commandé par des créneaux rectangulaires de
largeur variable. Ce procédé permet une alimentation du moteur à tension moyenne variable.
La machine à courant continu MCC est à excitation indépendante. (Il ne faudra JAMAIS couper
l'excitation (inducteur) de la MCC). Cette excitation est créée par l'alimentation auxiliaire de la table
(2,5A max).
Le hacheur 4 quadrants sera alimenté par l'alimentation principale de la table Ualim (16A max). Pour
une mise sous tension progressive, un autotransformateur avec transformateur d’isolement sera utilisé.
Le Hacheur 4 quadrants est réalisé au sein d’un dispositif intégré SEMIKRON muni d’un système de
commande externe permettant de réaliser une commande complémentaire totale synchrone.
Cette commande générant les fonctions de commutation assure également une limitation de courant à
20 A grâce à la mesure effectuée par une sonde à effet Hall qui doit lui être connectée sur le calibre 100
mV / A (entrée mesure courant). Cette boîte de commande permet également de générer l’alimentation
15 V des blocs de commande intégrés dans le hacheur.
On réglera la vitesse en modifiant la tension U de l'induit de la MCC, à la sortie du hacheur située entre
deux bras de pont. C'est le rapport cyclique des fonctions de commutation des interrupteurs fm1, fm2,
fm3, fm4 qui déterminera le rapport entre U et Ualim.
Préparation
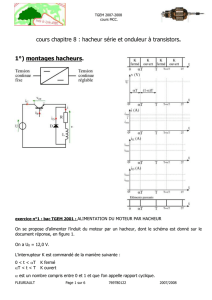
Le hacheur est alimenté par une source
de tension constante de valeur UALIM. Il
est constitué de deux bras de pont
indépendants commandés à fréquence
fixe Fd. On note les rapports cycliques
suivants : α
1 pour T11 et α
2 pour T21, la
commande de chaque bras étant de
type complémentaire totale. On
suppose bien sûr les composants
parfaits, diodes et transistors. Entre les
deux bras de pont, on maintient la
relation de commande suivante :
α
1 + α
2 = 1.
Exprimer en fonction de α1 les valeurs moyennes (à la fréquence de découpage Fd) de la tension
aux bornes de l’induit moteur, notée UMCC.
Ualim U
I
fm1
fm2
fm3
fm4
MCC

TP Machine à Courant Continu + Hacheur 4 Quadrants - 2ème année 2DA -2010-
Page 2 sur 5
1.- Relevé de la plaque signalétique :
• Relever les caractéristiques de Pn, In, Un, Ωn et le n° de série de la machine étudiée.In et Un sont les
valeurs nominales, donc maximales (à ne pas dépasser) en régime permanent.
• Relever les caractéristiques de l'inducteur (excitation) de la machine à courant continu.
Rappeler les lois fondamentales du comportement de la MCC et le modèle électrique simple d'une MCC utilisée en
moteur à courant continu.
On veillera au cours des manipulations à rester
dans la plage de fonctionnement nominale (courants, tensions) des machines
2.- Montage :
Montage commande :
• Le boîtier de commande pilotant le hacheur doit être connecté complètement au hacheur : 4 sorties
commandant chaque interrupteur, 2 entrées d'erreur, une sonde de température et une sonde
mesurant le courant d'induit IMCC. Ainsi que l'alimentation 0/15V.
• Prévoir pour la visualisation de la commande à l'oscilloscope des "T" coaxiaux. Relever rapidement les
grandeurs de commande des transistors T11 et T12. En déduire la fréquence de découpage, le
rapport cyclique minimal et maximal et la valeur des temps morts utilisés. Déterminer également la
valeur de la tension de commande externe permettant d’imposer un rapport cyclique de 50 %.
On conservera cette commande de rapport cyclique à 50% (~2,5V) pour la mise sous tension de UALIM.
Montage puissance :
• Le courant d'excitation (Iex)MCC est créé à partir de l'alimentation continue auxiliaire (Uex)MCC ≈ 200V.
• L'alimentation principale UALIM sera réglée de manière à obtenir la tension nominale de la MCC en
sortie du Hacheur (+/- 220V pour les deux sens de rotation). On majorera cette valeur « théorique »
de UALIM de 15 % pour tenir compte des chutes de tension et des limitations de rapport cycliques
inhérentes à la boîte de commande.
• La sortie du hacheur UMCC (entre 2 bras de pont) alimente l'induit de la MCC.
Le montage étant assez « volumineux » à réaliser, il faudra prendre soin de câbler les différents blocs
entre eux de manière aisément vérifiable. Les différents appareils de mesure devront être lisibles sans
effort et l’oscilloscope sera aussi éloigné que possible des connexions de puissance
Pour le relevé des courants et des puissances, on pourra faire plusieurs spires autour de la pince à
condition de prendre en compte le nombre de spires dans la mesure des courants et puissances.
Le montage doit être vérifié par l'enseignant avant la mise sous tension.
Il en sera de même après chaque modification du circuit.
On fera vérifiera avant chaque mise sous tension que les autotransformateurs sont sur 0% afin d'éviter
des courants de magnétisation destructeurs

TP Machine à Courant Continu + Hacheur 4 Quadrants - 2ème année 2DA -2010-
Page 3 sur 5
3.- Mise en route et caractéristique statique
Mise en route :
• Vérifier la présence d'un courant d'excitation dans l'inducteur de la MCC.
• Régler la commande du rapport cyclique à 50% (~2,5V) pour la mise sous tension de UALIM.
• Augmenter progressivement la tension UALIM jusqu'à ~115% de la tension nominale de la MCC.
• Vérifier alors le bon fonctionnement du dispositif en faisant varier délicatement la commande du
rapport cyclique dans les deux sens. Vérifier en permanence la valeur du courant dans l'induit.
• Que se passe-t-il si la variation est trop brutale ?
• Relever en utilisant la sonde différentielle de tension la tension aux bornes d'un interrupteur ainsi que
sa commande. Relever les nouveaux "temps morts" cette fois-ci dus aux drivers SKHI22 pilotant les
IGBT ainsi que la nouvelle plage de variation du rapport cyclique.
Caractéristique statique :
• En vérifiant toujours que UALIM reste constant, relever l’allure de la tension aux bornes du moteur
UMCC(t) et du courant d’induit IMCC(t) pour les valeurs de rapport cyclique α suivantes : αmin , 0.25,
0.5, 0.75 et αmax, le moteur étant laissé à vide. Relever soigneusement les valeurs extrêmes de
rapport cycliques possibles, αmin et αmax.
• Tracer la caractéristique de réglage UMCC(Vc), où UMCC représente la valeur moyenne de la tension aux
bornes du moteur UMCC(t), toujours à vide et Vc la tension de commande du dispositif (de 0 à ~5V).
Déterminer également la relation entre cette tension de commande Vc et le rapport cyclique α.
• En vérifiant toujours que UALIM reste constant, relever le réseau de caractéristiques de sortie
UMCC(IMCC) de ce hacheur pilotant le moteur, UMCC étant toujours la valeur moyenne de la tension
d’induit, IMCC l’intensité du courant moyen absorbé par le moteur, le réseau étant paramétré par le
rapport cyclique α.
Pour effectuer ces mesures, on "chargera" le moteur par une génératrice à courant continu (ne pas
oublier de câbler son excitation indépendante en parallèle de la première) simulant ainsi un couple
de charge mécanique. Cette génératrice sera progressivement chargée par une résistance (intégrée à
la table) en surveillant en permanence le courant d’induit moteur.
Pour faire varier IMCC , il suffit de faire varier la résistance de charge de sortie.
IMCC (signe ?) UMCC Vc α UALIM = cste
0 A αmin UALIM = cste
……… αmin UALIM = cste
IMCC MAX αmin UALIM = cste
IMCC (signe ?) UMCC Vc α UALIM = cste
0 A 0,25
UALIM = cste
……… 0,25
UALIM = cste
IMCC MAX 0,25
UALIM = cste
IMCC (signe ?) UMCC Vc α UALIM = cste
0 A 0,75
UALIM = cste
……… 0,75
UALIM = cste
IMCC MAX 0,75
UALIM = cste
IMCC (signe ?) UMCC Vc α UALIM = cste
0 A αmax UALIM = cste
……… αmax UALIM = cste
IMCC MAX αmax UALIM = cste
On fera attention à bien garder constante la tension d'alimentation UALIM à l'alternostat principal.
Interprétation :
Dans quel(s) quadrant(s) fonctionne le dispositif ?

TP Machine à Courant Continu + Hacheur 4 Quadrants - 2ème année 2DA -2010-
Page 4 sur 5
4.- Etude du hacheur en régime dynamique
Dans cette étude, il faut générer un rapport cyclique du type : α = α0 + Δα(t) où Δα(t) est une variation
"lente" et α0 = 0.5. Pour cela, la tension de commande utilisée pour piloter le dispositif comprend une
composante continue "offset" V0 et une composante alternative de fréquence faible, notée Δv(t).
On laissera toujours le moteur à vide et l’on prendra soin de systématiquement se placer au point de
rapport cyclique 50% lors des modifications du générateur de commande avec un montage sous
tension afin d’éviter les surintensités.
On utilise un GBF pour générer la commande externe du rapport cyclique.
• Utiliser la caractéristique de réglage précédente pour déterminer V0 et Δv(t) afin de faire varier le
rapport cyclique linéairement entre 0.25 et 0.75. Appliquer cette tension progressivement sur le
dispositif (amplitude lentement augmentée), à une fréquence de cycle de 0.3 Hz environ (fréquence
du signal Δv).
• Relever alors simultanément le courant d’induit moteur IMCC(t) et la tension mesurée par la
génératrice tachymétrique VT (image de la vitesse Ω). Comment interpréter ces courbes en utilisant
le mode XY de l’oscilloscope (avec une rémanence suffisante) ?
On pourra améliorer la mesure en intercalant un filtre passe pas sur la mesure du courant afin
d’éliminer son ondulation. Comment choisir la fréquence de coupure de ce filtre ?
• Observer la tension UALIM (t) et le courant moteur IMCC(t) pour mettre en évidence la réversibilité. Que
peut-on en déduire ?
• En choisissant maintenant une variation brutale (signal carré) du rapport cyclique entre 0.4 et 0.6,
reprendre les mesures précédentes et interpréter les résultats obtenus.
• Quelle est la bande passante de ce dispositif ?
ANNEXE
Rappelssurlamachineàcourantcontinu:
EForceélectromotrice,ΦFluxinducteur,ΩVitessederotationdelʹarbre E=kΦxΩ
Cemcouplemoteurélectromécanique,ΦFluxinducteuretIMCCcourantdʹinduit. Cem=kΦxIMCC
Lefluxdanslʹinducteur,donclecourant(Iex)MCC,donnelavaleurducoefficientkΦ.
Etlemodèleélectriquedonne:UMCC=E+rMCC.IMCC

TP Machine à Courant Continu + Hacheur 4 Quadrants - 2ème année 2DA -2010-
Page 5 sur 5
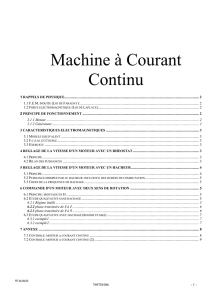
Aperçudesinterrupteursutilisésencommutationdepuissance
Semi-conducteur
CARACTERISTIQUES
MOS-FET IGBT LTR
Symbole
Conduction
Conductivité courant
Pertes
faible
grande
élevée
faibles
élevée
faibles
Blocage
Seuil supérieur
élevée
moyen
Commutation
Temps d’excitation
Temps de d’excitation
Pertes
bref
bref
faibles
moyen
moyen
moyenne
moyen
bref
grande
Commande
Puissance consommée
Grandeur
faible
tension
faible
tension
élevée
courant
Vu sa gamme de puissance, sa conductivité, sa fréquence de commutation, et sa simplicité de commande, le
transistor IGBT convient parfaitement au variateur de vitesse.
On utilise des modules d’IGBT de marque SEMIKRON et de référence : Skm 75 GB 123D
Ces modules sont appropriés car ils supportent une tension maximale de 1200V, un courant de 50A avec une
température du dissipateur T = 80°C.
De plus, ils sont commandés à l’ouverture et à la fermeture par le biais d’une tension de gâchette provenant du
SKHI22. Ce dernier applique une tension de 15V pour le rendre passant.
LeSKHI22deSemikron:
a) Pourquoi ?
C’est une interface de commande pour thyristors et transistors (IGBT). Ce driver est composé de 2 parties
complémentaires pour la commande de 2 éléments. Sa particularité est d’avoir une isolation galvanique entre la
partie commande et la partie puissance, évitant ainsi des risques de surtensions ou de courant trop fort. Notons
une autre particularité importante et essentielle pour la « survie » des IGBT. Le SKHI22 génère des retards au
niveau des commandes, très utiles lorsque pour commander un onduleur ou un hacheur 4Q. Nous verrons dans
les relevés suivants le temps de réponse d’un IGBT par rapport à sa commande.
Ces retards évitent un empiétement des commandes.
S’ils n’existaient pas, un court-circuit franc de l’alimentation serait fatal pour le système.
b) Ce qu’il sait faire...
* 1 seule alimentation pour deux commandes.
* Ajustage externe des retards, surveillance de l’alimentation, Rg on/off pour application spécifique.
* Valeur de dV/dt très élevée de 24kV/μs (isolement par transfo au lieu d'optoélectronique).
*Isolement entre commande et IGBT jusqu’à 4kV.
*Courant de crête 3.3 A.
*Signal d’erreur
*Interverrouillage des entrées interdisant la conduction simultanée.
*Valim<13 V
*VGE de commande 0-15V
*Compatibles CMOS avec une grande immunité au bruit
*Protection contre les courts- circuits.
*Coupure adoucie du court-cicuit.
1
/
5
100%