Rapport TP Matlab : Méthodes d'Optimisation

Compte rendu de TP Matlab
Apprentissage de Matlab via l’implémentation de méthodes d’optimisation
Par Henri-
François Chadeisson,
Compte rendu de TP Matlab
Apprentissage de Matlab via l’implémentation de méthodes d’optimisation
François Chadeisson,
Manuel Rolland et Mickaël Mounier.
Apprentissage de Matlab via l’implémentation de méthodes d’optimisation
05/05/08

Compte rendu de TP Matlab
Page 2
Compte rendu de TP Matlab
Apprentissage de Matlab via l’implémentation de méthodes d’optimisation
Sommaire
1. D
ESCENTE DE GRADIENT
..................................................................3
a.
Principe ..................................................................................... 3
b.
Résultats .................................................................................... 3
c.
Conclusions ................................................................................. 5
2. M
ETHODE DE
N
EWTON
....................................................................6
a.
Principe ..................................................................................... 6
b.
Résultats .................................................................................... 6
c.
Conclusions ................................................................................. 7
3. BFGS ....................................................................................7
a.
Principe ..................................................................................... 7
b.
Résultats .................................................................................... 8
c.
Conclusions ................................................................................. 8
4. E
SSAIM DE PARTICULES
....................................................................9
a.
Principe ..................................................................................... 9
b.
Résultats .................................................................................... 9
c.
Conclusions ................................................................................ 13

Compte rendu de TP Matlab
Page 3
1. Descente de gradient
a. Principe
La descente de gradient est une méthode d’optimisation très simple où l’on utilise la dérivée
(ou le gradient, en dimension > 1) d’une fonction afin de trouver un extremum local. La
méthode repose sur la formule itérative :
On arrête l’itération lorsque le vecteur
« ne varie plus ». Soit donc quand
|
| .
Physiquement, dans le cas de la recherche de minima d’une fonction de R
2
dans R, en
imaginant que le point soit une bille, cette méthode revient à trouver la zone où
l’accélération est minimale en se laissant guider par la pente de la surface.
Comment choisir ? Grossièrement, détermine la vitesse de descente de la pente, si on le
choisi trop gros on risque de sauter par-dessus l’extrema. Mais si on le choisit trop petit la
convergence est lente. Une solution intéressante est donc de le décrémenter à chaque
itération. Cette méthode n’est pas satisfaisante car on fini par ne plus avancer du tout au
bout de plusieurs itérations (alors que l’on est peut être encore loin de l’extrema). Une
solution plus appropriée qui marche bien dans la pratique est de l’incrémenter si
ou de le décrémenter sinon.
b. Résultats
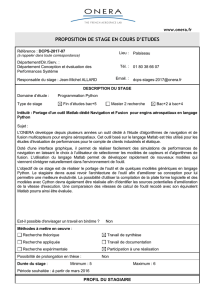
Avec la fonction f(x) = x² (fichier « gradient.m ») :

Compte rendu de TP Matlab
Page 4
La méthode fonctionne bien car la pente est grande et la courbe simple.
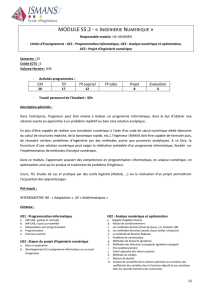
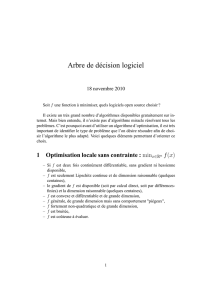
Avec la fonction de Rosenbrock (fichier « gradient2.m ») :

Compte rendu de TP Matlab
Page 5
Il faut choisir un compromis entre et . C'est-à-dire qu’il faut faire un compromis
entre vitesse de convergence et précision (comme souvent). Un des meilleurs résultats
que l’on a pu obtenir (cf. capture d’écran) est un extrema à [0.9995 ; 0.9990] au bout
de 7900 itérations. Généralement l’on s’arrête avant et le résultat devient faux.
Certains points ont des positions étonnantes à cause de l’augmentation d’ à certaines
itérations.
c. Conclusions
Cet algorithme naïf fonctionne mais il converge excessivement lentement. De plus, il est très
dépendant des réglages que l’on peut faire : , et la façon dont ce dernier varie. Dans les
implémentations que nous avons faites ces réglages sont bien choisis. En revanche, si on les
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%