E04 Moteur asynchrone

Electricité 4 Moteur asynchrone triphasé 1
ALEXANDRE - CORNET Ciney
L1 L2 L3
MOTEUR ASYNCHRONE TRIPHASE
1. Principes du moteur asynchrone triphasé.
1.1. Principe de base du moteur : rappel Champ
magnétique (β)
F = β I L Energie électrique (I) Energie mécanique (F)
Règle des trois doigts
de la main droite
Un conducteur traversé par un courant I et soumis à une induction magnétique β est le siège
d’une force F qui tend à le mettre en mouvement.
1.2. Production d’un champ magnétique tournant :
Le principe de fonctionnement des moteurs asynchrones repose sur la production d’un champ
tournant.
Un aimant mis en rotation produit un champ magnétique tournant dans l’espace.
Ce procédé n’est évidemment pas applicable tel quel au moteur asynchrone, puisqu’il faudrait
une énergie mécanique pour faire tourner l’aimant.
Sur les moteurs triphasés, le champ tournant est produit au stator par 3 enroulements fixes,
décalés de 120° dans l’espace et parcourus par des courants présentant le même déphasage
électrique (courants triphasés 5OHz).
Puisque les 3 phases L1-L2-L3 passent successivement par un maximum, un pôle Nord
apparaît successivement à la bobine B1 puis à la bobine B2, puis à B3 etc …
Ce cycle se renouvelle 50 fois par seconde (réseau de fréquence 50 Hz).
Au temps t1 de l’oscillogramme, la phase L1 passe au maximum positif et les phases L2 et L3
sont négatives. Nous obtenons donc à cet instant un pôle Nord à la bobine B1 et deux petits
Sud aux bobines B2 et B3.
Sans rotation mécanique, nous générons au stator, un champ tournant dans l’espace dont la
vitesse est de 50 tours par seconde (3000 tours par minute).
1.3. Mise en rotation du rotor : principe
Le stator génère le champ tournant.
Le rotor, constitué d’un ensemble de conducteurs électriques, est placé au cœur du champ
tournant.
Au départ, le rotor est immobile et voit défiler devant lui le champ tournant statorique.
Il est donc soumis à une variation de flux Δφ/Δt.
Etant bon conducteur du courant électrique, il est le siège d’une force électromotrice
e = - Δφ/Δt et donc de courants induits appelés courants de Foucault iF = e/ Rconducteurs.
Moteur
L1 L2 L3

Electricité 4 Moteur asynchrone triphasé 2
ALEXANDRE - CORNET Ciney
Tôle de
stator
Tôle de
rotor
Cage rotorique
D’après la loi de Lenz, ces courants vont s’opposer à la cause qui leur a donné naissance
c’est-à-dire à la variation de flux. Le rotor se met en rotation pour essayer de rattraper le
champ tournant et donc diminuer la variation de flux.
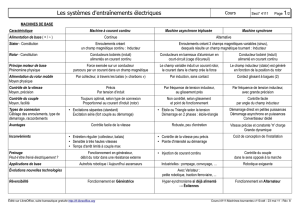
2. Technologie du moteur asynchrone triphasé.
2.1. Moteur asynchrone à rotor en cage d’écureuil :
Le stator : C’est la partie fixe du moteur. Il s’agit d’une carcasse constituée d’un empilement
de tôles d’acier de qualité magnétique. Le stator supporte les enroulements. Ceux-ci sont
connectés au réseau triphasé et produisent le champ tournant.
Le rotor : C’est la partie mobile du moteur. Il est constitué d’un empilage de tôles d’acier
(pour minimiser les iF) formant un cylindre.
Des trous ou des encoches longitudinales sont ménagées dans la périphérie de ce cylindre.
C’est dans ces encoches que sont placés les conducteurs en cuivre ou injectés en aluminium.
Aux 2 extrémités, ils sont court-circuités par une couronne. L’ensemble présente l’aspect
d’une cage d’écureuil. Des ailettes de refroidissement sont prévues à une extrémité du rotor.
Caractéristiques :
Ce rotor est compact, peut être parfaitement équilibré par recylindrage ce qui lui confère une
grande robustesse mécanique.
D’un point de vue électrique, le moteur à cage d’écureuil présente un couple de démarrage
assez faible ainsi qu’un appel de courant au démarrage très élevé.
Vu sa simplicité et sa robustesse, son coût d’achat et son coût d’entretien sont faibles.
Les moteurs à rotor à cage de faible puissance peuvent la plupart du temps être employés en
démarrage direct, mais ceux de moyenne et forte puissance nécessitent un dispositif
réduisant le courant de démarrage.

Electricité 4 Moteur asynchrone triphasé 3
ALEXANDRE - CORNET Ciney
Document Leroy-Somer
2.2. Moteur asynchrone à rotor bobiné :
(moteur à bagues)
Au lieu de loger des conducteurs massifs dans les encoches
du rotor, on y place un jeu d’enroulements triphasé. Les
enroulements sont court-circuités à une extrémité (couplage
étoile). Les 3 extrémités libres sont raccordées à des
résistances externes grâce à un triple jeu de bagues et de balais.
Caractéristiques :
Ces résistances sont insérées au démarrage afin d’augmenter la résistance de l’enroulement et
ainsi réduire fortement la pointe du courant de démarrage. Cette qualité est intéressante
pour des moteurs puissants placés sur des réseaux relativement sensibles
On constate également que l’insertion de ces résistances augmente le couple de démarrage,
ce qui est précieux lorsqu’un moteur entraîne une charge dont le couple résistant de décollage
est élevé.
L’insertion de plus ou moins de résistances rotoriques, permet de faire varier la vitesse du
moteur dans une certaine mesure.
Ce moteur possède donc toutes les qualités électriques. Par contre, les enroulements
rotoriques ainsi que le système de bagues et balais le rendent plus vulnérable
mécaniquement et plus cher aussi bien à l’achat qu’à l’entretien.
3. Vitesse – Glissement – Courant de démarrage.
3.1. Asynchronisme et glissement :
Le glissement mesure la vitesse relative rotor/synchronisme par rapport à cette vitesse de
synchronisme.
g = (ns – nr) / ns nr = ns (1 – g) avec ns = vitesse synchronisme (champ tournant)
nr = vitesse du rotor
Si, par le principe de la loi de Lenz, le rotor rattrapait le champ tournant pour tourner à sa
vitesse, leur vitesse relative serait nulle (glissement g = 0) donc il n’y aurait plus variation de
flux et donc plus de couple moteur ce qui est impossible.
C’est pourquoi ce moteur s’appelle asynchrone (qui n’est pas synchrone).
Ainsi le rotor tourne-t-il toujours moins vite que le champ tournant.
On dit qu’il y a glissement du rotor par rapport au champ tournant.
R externes
Balais
Bagues
tournantes
Enroulements
rotoriques

Electricité 4 Moteur asynchrone triphasé 4
ALEXANDRE - CORNET Ciney
3.2. Variation du glissement avec la charge :
Si la charge (machine entraînée) appliquée au moteur augmente, le rotor va ralentir, le
glissement augmente ainsi que la variation de flux.
De ce fait, les courants induits au rotor et le couple moteur vont aussi augmenter et nous
retrouverons une vitesse pour laquelle l’équilibre sera rétabli entre le couple moteur et le
couple résistant.
Le glissement vaut en général de 1% à vide à 5% en charge. Pour un moteur dont
Ns = 3000tr/min, la vitesse réelle du rotor varie de 2970 à 2850tr/min
3.3. Courant de démarrage :
Au démarrage, le rotor étant encore immobile (glissement max g = 1), les variations de flux
sont maximales. Les courants induits au rotor ainsi que le courant absorbé par le stator au
réseau (qui est son image) sont importants.
Cette pointe de courant de démarrage vaut 5 à 7 fois le courant nominal (à charge normale
maximum). Retenons pour un moteur à cage d’écureuil : Id = 6 IN
3.4. Vitesse :
La vitesse à vide des moteurs asynchrones n’est pas influencée par les variations de tension,
mais elle est proportionnelle à la fréquence et inversement proportionnelle au nombre de pôles
par phase du stator (p). n (tr/s) = f (Hz) / p
Nb pôles
par phase
Nb total
pôles triphasés
Nb total
pôles monos
Vitesse
tr/s
Vitesse
tr/min
1
3
2
50
3000
2
6
4
25
1500
3
9
6
50/3
1000
4
12
8
12,5
750
5
15
10
10
600
6
18
12
50/6
500
En pratique, même lorsqu’il s’agit d’un moteur triphasé, on parle par habitude, du nombre de
pôles monophasés.
Il est plus logique de parler du nombre de « triplets» ou de « paires » de pôles
3.5. Inversion de sens de marche :
En inversant 2 phases d’alimentation du moteur, on inverse le champ tournant et donc le sens
de rotation du moteur.
4. Puissance - Couple - Rendement.
4.1. Fréquence des courants induits au rotor :
Puisque le rotor tourne à la vitesse nr légèrement inférieure à celle du champ tournant ns, tout
se passe comme si le rotor était fixe et que le champ statorique défilait à ns – nr ( = g ns).
Donc la fréquence des courants induits est frot = g f
A l’arrêt : g = 1 => fr = f = 50 Hz
A vide : g = 1% => fr = gf = 0,5 Hz

Electricité 4 Moteur asynchrone triphasé 5
ALEXANDRE - CORNET Ciney
4.2. Inventaire des pertes et schéma bloc d’un moteur asynchrone :
Il existe des pertes fers (par hystérésis et par courant de Foucault) ainsi que des pertes Joules
(cuivre des enroulements), aussi bien au stator qu’au rotor. Revoir les rappels à ce sujet.
Nous considérons les pertes mécaniques (par ventilation et par frottement) comme
indépendantes pour séparer le système mécanique de l’électrique.
Comme la fréquence des courants induits du rotor est faible, nous pouvons négliger les pertes
fer rotoriques pfr = 0. En effet le rotor tourne presque à la vitesse du champ tournant.
PTr est la puissance transmise du stator au rotor par le couple électromagnétique du champ
tournant dont la vitesse angulaire est ωs. C = PTr / ωs (1)
Le rotor réagit en opposant un couple égal. Le rotor tourne à la vitesse angulaire ωr.
D’où C = Pu élec / ωr (2)
La transmission de la puissance du rotor se fait avec une perte de vitesse (ωr < ωs) et une
perte de puissance (Pu élec < PTr), mais à couple constant.
Sachant que pjr = PTr – Pu élec (voir schéma bloc)
g = (ns – nr)/ns = (ωs - ωr)/ωs (voir § 3.1.)
(1)(2) =>
Nous obtenons : (3) et (4)
4.3. Schéma équivalent et étude mathématique du couple, du courant et du cosϕ = f(glissement) :
Le moteur asynchrone peut être assimilé à un transformateur dont le primaire (stator) est
alimenté par une tension constante en grandeur qui crée un champ magnétique variable
(champ tournant) et dont le secondaire (rotor) est court-circuité.
Il faut tenir compte que le secondaire est alimenté à fréquence variable suivant la vitesse du
rotor.
Schéma équivalent :
Au démarrage (ωr = 0 et g = 1), la fréquence est de 50 Hz.
Appelons E2 la tension secondaire à rotor calé (rapport de tension du transfo = 1)
X2 la réactance inductive secondaire à rotor calé
R2 la résistance secondaire.
Stator
Rotor
Pa PTr Pu élec mécanique Pu méca
(ωs) (ωr)
pjs pfs pjr pfr pm
pjr = g PTr
C = pjr / g ωs
E2 g E2 I2
g X2 R2
gE2
gX2I2
R2I2
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%