Actionneur électrique

115.8 mm
48 mm
Nouveau
Nouveau
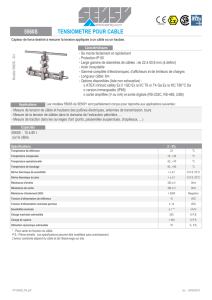
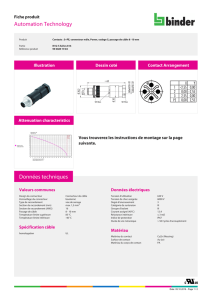
Actionneur électrique
Glissière de guide de tige
Moteur pas-à-pas (Servo/24 VDC)
Profil étroit/plat Hauteur 48 mm
Profil réduit par le montage
latéral du moteur
Avec couvercle
de courroie
LEL25 LEFB25
Course max. : 1000 mm
Vitesse de transfert : 1000 mm/s
2 types de contrôleur sont offerts
T
ype avec entrée de données de positionnement
64 points de positionnement
Entrée grâce à un kit de réglage du contrôleur ou un boîtier de commande
14 points de positionnement
Paramètrage du tableau de commande
Série LECP6
Type sans programmation
Série LECP1
LEL25M
LEL25L
Modèle Guide Course [mm]
Charge de travail (horizontale) [kg]
Vitesse [mm/s]
Répétitivité de positionnement [mm]
Guide lisse
Guide à billes
Taille
25 3
5
Jusqu'à 1000
Jusqu'à 1000
Jusqu'à 500
Jusqu'à 1000
±0.1
±0.1
RoHS
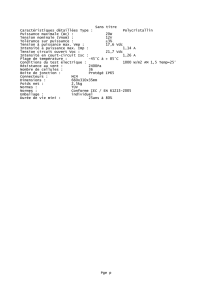
BASBAS
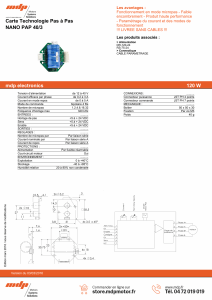
Avec couvercle
Aucune interférence avec le moteur,
même avec de grandes pièces !
Table
Moteur
Entraînement par courroie
Pièce
Proposé avec guides lisses ou guides à billes.
CAT.EUS100-101A-FR
Série LEL

Exemples d'applications
Transfert de charge et de
décharge des pièces
Prise et pose
Applications pour lesquelles
l'espace est limité
Construction simple
Des types de guide peuvent être sélectionnés.
s Câble standard
s Câble robotique (câble flexible)
Avec couvercle
de courroie
Câbl d d
2 types de câble de moteur sont proposés
Pour utilisation sur table manuelle
Réglage possible lorsque
l'alimentation est coupée
P ili i bl ll
Vis de commande
manuelle
Couvercle de moteur
disponible (en option)
Maintien d'une pièce
Miti d' iè
Verrouillage par absence
de tension
(en option)
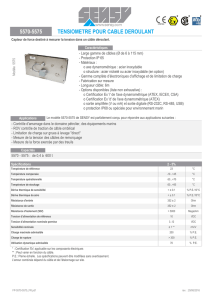
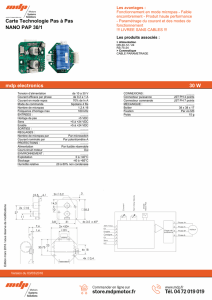
Moteur compatible
Moteur pas-à-pas (Servo/24 VDC)
Détecteur
Rail de détecteur
s Guide lisse
Charge max. : 3 kg (horizontal)
Réduction du bruit (60 dB max)
Note)
s Guide à billes
Charge max. : 5 kg (horizontal)
Vitesse de transfert : 1000 mm/s
Contrôle la limite et le signal intermédiaire
Compatible avec le D-M9 et le D-M9W (double visualisation)
∗ Les détecteurs doivent être commandés séparément. Reportez-vous aux pages 8 et 9 pour plus de détails.
Glissière de guide de tige
Taille : 25
Type
Moteur pas-à-pas (Servo/24 VDC)
Série LEL
W
Course max. : 1000 mm
Vitesse de transfert : 1000 mm/s
Note) Lorsque la vitesse maximum est 500 mm/s
(Mesurée par SMC)
Type de guidage
Entraînement par courroie
C
ô
é
Montage possible de détecteurs (Exécutions spéciales)
Détecteur statique double visualisation
Le réglage adéquat de la position de montage peut
être réalisé sans erreurs.
Un voyant
vert
s'allume
pour la plage d'utilisation
optimale.
Plage d'utilisation
OFF
ON
Rouge
Vert
Rouge
Plage d'utilisation optimale
Caractéristiques 1

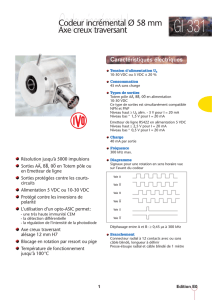
Construction du système
LECP6
LECP1 (sans programmation)
Réf.
LEC-CN5-
LEC-CK4-
Alimentation électrique
pour signaux E/S 24 VDC
Câble USB
PC
Unité de conversion
(type B, A-mini)
Réf. LEC-T1-3EG
avec câble de 3 m
Kit de paramétrage du contrôleur (option)
Kit de paramétrage du contrôleur
(Câble de communication, unité de conversion et câble USB inclus.)
Réf. LEC-W2
Ou
Page 21
Boîtier de commande (option)
Page 22
Page 4
Alimentation
du contrôleur
24 VDC
Actionneur électrique
Contrôleur
Câble E/S
Câble du moteur (Fixe)
Programmation des positions
LECP6
Type de contrôleur
LECP6
(Programmation des positions)
LECP1
(sans programmation)
LE-CP-
LE-CP-
Câble robotique
LE-CP--S
LE-CP--S
Câble standard
Câble d'actionneur
Type de contrôleur
Pages 19, 29
LECP6
(Programmation des positions)
LECP1 (sans programmation)
Connecteur d'alimentation (accessoire)
Câble d'alimentation (1.5 m) (accessoire)
Connexion
Alimentation
Type de contrôleur
Pages 16, 30
Page 13 Page 24
Sans programmation
LECP1
Pages 20, 30
Série LEL
API
Câble de communication
(3 m)
Fourni par le client
Fourni par le client
Actionneur électrique/
Glissière de guide de tige
Caractéristiques 2

Exemple de paramétrage des données de positionnement
Exemple de contrôle du moniteur
Réglages simplifiés pour mode simplifié
Données Axe 1
Étape n° 0
Pos. 123.45 mm
Vitesse 100 mm/s
Moniteur Axe 1
Étape n° 1
Pos. 12.34 mm
Vitesse 10 mm/s
Les données peuvent être enregistrées en appuyant sur le
bouton "SET", une fois que les valeurs ont été entrées
.
Pour vérifier
l'état du statut
Réglage simplifié
à utiliser immédiatement
Sans programmation
Lancement du test
Réglage de
la position
Réglages du
mouvement à
vitesse constante
<Avec un PC>
Logiciel pour le paramétrage du contrôleur
Un écran suffit pour régler les données de
positionnement, lancer le test, régler les
impulsions et la vitesse.
Contrôleur sans programmation Série LECP1
LECP6
Pour une utilisation immédiate, sélectionnez "Easy Mode" (mode facile).
<Avec un boîtier de commandes (TB)>
Écran du boîtier de commandes
L'affichage simple, sans défilement, facilite les
réglages et l'utilisation.
Sélectionnez une icône sur le premier écran, puis
choisissez une fonction.
Réglez les donnéesde positionnement et vérifiez le moniteur
sur le deuxième écran.
Les données réglées peuvent
être la position et la vitesse
(d'autres réglages sont possibles.).
Réglage d'une valeur de position
Réglage d'une valeur enregistrée
pour la position d'arrêt
Maximum 14 points
Déplacer l'actionneur sur une position
d'arrêt à l'aide des touches
ARRIÈRE/REVERSE
Enregistrer la position
d'arrêt grâce à la touche
SET
1
Réglage de la position d'arrêt
2
Enregistrement
3
Sélecteur
de position
Touches
ARRIÈRE/REVERSE
Affichage valeur
de position
Touche SET
2 types de contrôleur sont proposés
Moteur pas-à-pas
(Servo/24 VDC)
LECP1
Moteur pas-à-pas
(Servo/24 VDC)
Type avec entrée de données de positionnement
Série
LECP6
Données Axe 1
Étape n° 0
Pos.
50.00 mm
Vitesse 200 mm/s
Données Axe 1
Étape n° 1
Pos. 80.00 mm
Vitesse 100 mm/s
Permet de configurer l'opération d'un actionneur électrique sans recourir à un ordinateur ou à un boîtier de commandes
Réglage de 16 niveaux de
vitesse/accélération
Réglage par impulsions
Réglage des données
de positionnement
1er écran 1er écran
2ème écran
2ème écran
Sélecteurs
de vitesse
Sélecteurs
d'accélération
Caractéristiques 3

Les réglages des données de
positionnement, des paramètres,
du moniteur, du boîtier de
commandes, etc. apparaissent
dans des fenêtres différentes.
Logiciel pour le paramétrage du contrôleur
<Avec un PC>
Choisissez le mode normal pour des réglages très précis.
<Avec un boîtier de commandes (TB)>
Écran du boîtier de commandes
Possibilité de paramétrer en détails les données de positionnement.
Possibilité de voir le statut des signaux de sorties
Réglages possibles des paramètres
JOG Possibilité de se déplacer à vitesse constante ou par impulsions, de faire un retour à l'origine ou de tester une position.
Les données de positionnement multiples
peuvent être stockées dans le boîtier de
commande et transférées au contrôleur.
Opération test continue pour jusqu'à 5
données de positionnement.
Chaque fonction (réglage des données de
positionnement, test, moniteur, etc.) peut
être sélectionnée à partir du menu principal.
L'actionneur et le contrôleur sont vendus ensemble mais peuvent être commandés séparément.
Vérifiez que la combinaison du contrôleur et de l'actionneur est correcte.
<Contrôlez les points suivants avant toute utilisation.>
q
Vérifiez le numéro du modèle sur l'étiquette de l'actionneur. Il doit être identique au numéro figurant sur l'étiquette du contrôleur.
w Vérifiez la compatibilité de la configuration E/S parallèle (NPN ou PNP).
Détails des réglages en mode normal
Menu Axe 1
Étape n°
0
Type de fonctionnement
Menu Axe 1
Étape n° 1
Position 123.45 mm
Arrêt
Moniteur de sortie Axe 1
BUSY[ ]
SVRE[ ]
SETON[ ]
Écran du menu principal
Fenêtre de réglage des
données de positionnement
Écran de test
Écran de contrôle
Menu Axe 1
Données de positionnement
Paramètre
Test
Fenêtre de paramétrage des
données de positionnement
Fenêtre de réglage
des paramètres
Fenêtre de contrôle Fenêtre de commandes
Actionneur Contrôleur
Actionneur
q w
qw
Caractéristiques 4
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
1
/
44
100%