REGLAGE D`UN CONTROLEUR FLOU POUR UN HACHEUR EN

,
REGLAGE
D'UN
CONTROLEUR
FLOU
POUR
UN
HACHEUR
EN
MODE
COURANT
Guillaume Gateau ,Pascal
Maussion
et
Jean Faucher
Laboratoire d'Electrotechnique
et
d'Electronique Industrielle
2, Rue Charles Camichel Toulouse
URA Associée C.N.R.S 847
Résumé
Nous présentons dans cet article une nouvelle approche
pour
la
régulation de tension
d'un
hacheur buck réversible en mode courant. La synthèse de
la
commande est basée
sur
une alliance
entre
le
principe de
la
commutation optimale
et
celui de
la
commande floue.
Elle possède pour avantage
sa
simplicité de mise en œuvre, elle offre une bonne robustesse
vis àvis de
la
variation des
paramètres
du système
et
donne des résultats très
prometteurs
aussi bien en asservissement qu'en régulation.
Les
résultats
en simulation sont comparés
aux approches classiques de l'automatique.
1
Présentation
du
système
1.1
Introduction
L'étude
des
systèmes
asservis
linéaires
conduit
au
calcul
d'une
fonction
de
transfert.
Cette
liaison
entre
les
entrées-sorties
du
système
peut
être
modifiée
par
l'adjonction
d'un
correcteur
qui
est
généralement
calculé
selon
certains
critères
définissant
le
type
de
réponse
désiré
pour
le
système
en
boucle
fermée
(Stabilité,
Temps
de
réponse,
Critères
optimaux
...
).
L'introduction
de
non
linéarité
dans
la
commande
permet
souvent
d'obtenir
un
système
mieux
asservi
et
plus
rapide
que
la
meilleure
commande
linéaire.
Par
contre
la
synthèse
d'une
telle
commande
pose
souvent
des
problèmes
pour
son
développement
et
sa
mise
en
œuvre.
Nous
présentons
ici
la
synthèse
d'une
commande
non
linéaire
qui
regroupe
à
la
fois le
principe
de
la
commutation
optimale
et
la
théorie
de
la
commande
floue
(Fuzzy
control).
Le
principe
de
la
commutation
optimale
est
basé
sur
la
saturation
de
la
commande
appliquée
au
processus
[3, 4, 8].
On
cherchera
à
appliquer
la
commande
maximale
Umax
pendant
un
temps
tl,
puis
à
appliquer
ensuite
son
opposé
pendant
un
temps
t2•
On
obtient
ainsi
trois
phases
différentes (uc=
Umax,
Uc=
-Umax
et Uc=0)
pour
la
commande
(figure
la)
.Le
passage
de
Uc=
Umax
àUc=
-Umax
est
réalisé
par
une
fonction
non
linéaire
'ljJ
(e,
~~)
qui
détermine
l'instant
de
commutation.
La
complexité
de
cette
fonction
croit
avec
l'ordre
du
système
[4]
et
présente
certaines
difficultés
pour
la
mise
en
pratique.
L'intérêt
du
contrôleur
flou
est
de
simplifier
la
mise
en
œuvre
de
cette
méthode
et
d'augmenter
la
robustesse
du
système
vis àvis
de
la
variation
des
paramètres
le
définissant.
L'aboutissement
de
ce
travail
est
une
solution
robuste
pour
le
contrôle
temps
réel
de
systèmes
électriques.
Une
application
est
développée
pour
un
convertisseur
statique
de
puissance
avec
des
résultats
très
prometteurs.
1

uc
/1\
+Umaxf-
11
-Umax
12
~
1
Ve
Ve
=200 V
O<Vs<Ve12
lch<lOA
Temps morts 1us
L,r
L=l.3
mH
Cs=31uF
r=0_10hms
Charge non
lineaire
(a)
Mode Courant 1
Re!
(b)
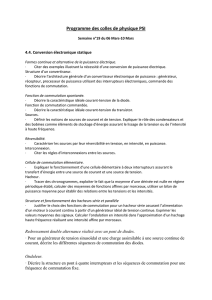
Figure
1 :
Description
du
système
Le
système
représenté
sur
la
figure
lb
correspond
à
un
hacheur
de
type
BUCK
réversible
en
courant
commandé
en
mode
courant
maximum.
Un
filtre
LC
permet
d'assurer
le filtrage
de
la
tension
à
la
sortie
du
demi-pont
avec
une
charge
non
linéaire
connectée
en
sortie.
Celle-ci
est
représentée
dans
son cas le
plus
défavorable
pour
la
boucle
de
régulation,
àsavoir
une
résistance
variant
de
façon
instantanée:
connexions
et
déconnexions
brutales
de
sous-systèmes.
Les
constantes
de
temps
électriques
mises
en
jeu
par
ce
dispositif
sont
très
faibles (
:::;
1ms)
et
représentent
une
difficulté
supplémentaire
pour
la
réalisation
temps
réel
du
contrôleur
flou.
1.2
Hacheur
BUCK
réversible
en
mode
courant
Le
principe
de
commande
en
mode
courant
d'un
convertisseur
statique
de
type
BUCK
consiste
à
imposer
le
courant
moyen
qui
traverse
l'inductance
de
lissage L,
donc
également
le
courant
de
sortie
dans
la
charge. Le
convertisseur
est
donc
transformé
en
une
source
de
courant
sur
laquelle
on
effectuera
un
asservissement
de
tension.
On
obtiendra
alors
une
régulation
de
type
cascade.
Ce
type
de
commande
possède
des
avantages
importants
par
rapport
à
la
commande
en
rapport
cyclique
ou
encore
par
fourchette
de
courant.
Outre
sa
simplicité
aussi
bien
de
sa
fonction
de
transfert
que
de
sa
mise
en-œuvre,
la
commande
en
mode
courant
(type
Modulateur
MO2)
permet
de
fonctionner
àfréquence fixe,
d'avoir
une
insensibilité
par
rapport
aux
variations
de
la
tension
d'entrée
et
d'assurer
une
protection
intrinsèque
contre
les
court-circuits.
Un
des
inconvénients
est
que
l'on
ne
contrôle
pas
directement
le
courant
moyen
dans
l'inductance
mais
le
courant
maximum.
En
régime
permanent
on
a
en
effet
-
Th
lM
-l=
--a(1-
a)
2Lli"
(1)
(avec
lM
courant
maximum
imposé,
l
courant
moyen
et
Th
période
de
hachage).
Un
autre
inconvénient
est
le
problème
d'instabilité
de
ce
mode
courant
pour
des
fonction-
nements
avec
~
2
~e.
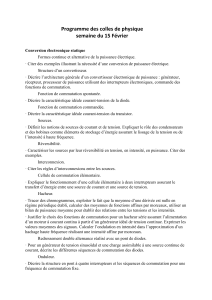
En
effet
on
peut
représenter
le
courant
dans
L
par
la
figure
2.
Les
pentes
du
courant
h
sont
données
par
les
expressions
(2)
et
(3)
respectivement
pour
les
phases
de
2

Il
Imn_
1
't+
n
T
Figure
2:
Courant dans L
montée
puis
de
descente.
E-Vs
T+ =
---
nL
(2)
_
-Vs
Tn=L
(3)
Le
régime
de
fonctionnement
sera
stable
si
en
régime
permanent
on
aI
mn
=I
mn
_1•Supposons
que
l'on
impose
Imaxref
constant,
on
a
donc
I
max
=I
mn
_1+
T:
On
I
mn
=I
max
+
T;:
(T
-
On)
(4)
(5)
d'où
d'après
(4)
et
(5)
(6)
A
partir
de
l'équation
(6),
on
peut
donc
exprimer
une
équation
de
récurrence
pour
la
variation
de
I
mn
:
llI=n =
(~~)
llI=n_l
Ce
qui
nous
donne
la
suite
géométrique
suivante
(7)
(8)
avec q=
(;j-).
La
convergence
de
la
suite
(8)
sera
as
urée
si
limn-.oo(llI=J
Iql
~
1:::;.
Vs
~
ie•
o
donc
pour
ne
limitation
au
niveau
•
Pour
pallier
cet
inconvénient,
il
est
préférable
de faire
intervenir
u
~
supérieurs
à0.5 mais
de
la
tension
de
référence ce qui
permet
d'obtenir
des
rapports
~
de
la
consigne, ce qui
seulement
en
régime
transitoire
pendant
les fortes
dynamiques
diminue
ainsi le
temps
de
réponse
de
la
boucle
fermée.
,vidence.
Pour
remédier
L'instabilité
du
hacheur
Buck
en
mode
courant
a
donc
ete
mIse
en
e
t:
àce
problème,
un
choix
est
àeffectuer
pour
réaliser
la
condition
Vs
< }
-
~
~,
ce
qui
assure
donc
•
La
première
solution
consiste à
limiter
le
rapport
cyclique
à
On=ax
rictive
car
elle diminuE
la
stabilité
du
fonctionnement.
Néanmoins
cette
solution
est
rest
la
dynamique
d'évolution
du
courant
lz.

1.3
Action
intégrale
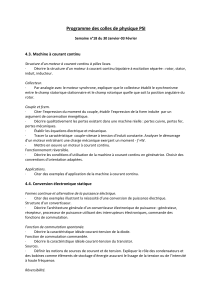
La
figure (3)
représente
le
schéma-bloc
de
la
boucle
de
régulation.
La
tension
de
commande
Uc
sera
fournie
par
un
contrôleur
flou.
Une
action
intégrale
est
insérée
entre
la
sortie
du
C.F
et
l'entrée
du
processus
pour
assurer
une
erreur
statique
nulle
et
également
filtrer
la
sortie
du
contrôleur
flou.
Pour
le calcul
de
Ti, nous ferons
l'hypothèse
que
la
commande
Uc
peut
prendre
deux
valeurs U
CTnax
et
-U
CTnax
et
que
la
tension
~
est
constante
pendant
un
transitoire
du
courant.
Ces
hypothèses
ne
sont
pas
trop
restrictives
et
font
apparaitre
la
dynamique
totale
de
la
commande
en
courant
donc
le cas le plus
critique
pour
le
calcul
de
Ti.
Rej
e,Controleur Uc 1
Ife!
Hacheur s
/
--
/
/
flou
Ti.p
-
Figure
3:
Schéma
bloc
de
la
boucle
de
régulation
D'après
ces
hypothèses,
nous connaissons
donc
après
l'intégrateur
la
dynamique
imposée
sur
le
courant
I
REF
.Le calcul
de
Ti
sera
effectué
pour
assurer
le
fonctionnement
du
hacheur
en
mode
courant
quelque
soit
la
charge
et
la
dynamique
imposé
sur
I
REF
.
La
commande
devra
donc
vérifier
l'équation
(9) où
I~~I+
et
I~~I-
représente
la
pente
équivalente
de
Il
pour
un
transitoire
positif
et
respectivement
négatif.
d'où
facilement
on
obtient
dI
REF
<
min
(ldII+
IdII-)
dt -
dt.
'dt
.
rrun
rrun
(9)
(10)
On
s'aperçoit
que
c'est
le
transitoire
négatif
qui
est
le
plus
défavorable,
c'est
à
dire
lors
du
passage
d'une
charge
nominale
en
fonctionnement
à
vide
sous faible tension.
Après
étude
en
simulation,
il
s'est
avéré
que
l'hypothèse
sur
la
non
variation
de
~
pendant
un
transitoire
négatif
du
courant
était
faussée
par
l'apparition
de
la
surtension
due
au
condensateur
ce qui nous a
permis
par
la
suite
de
choisir
une
constante
d'intégration
légèrement
plus
faible (Ti =O.2ms).
2
Principe
de
commande
2.1
Commutation
optimale
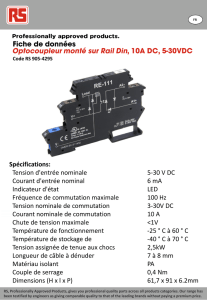
La
figure 4
représente
la
boucle de
régulation
basée
sur
le
principe
de
la
commutation
optimale.
La
fonction
<jJ(X)
avec X=
(e
~~)t
détermine
les
commutations
de
la
commande
au
travers
de
l'organe
non
linéaire
'IjJ(u)
=
satM(u).
Dans
le cas simplifié
donné
par
(11), les
réponses
dans
le
plan
de
phase
et
temporelles
sont
données
respectivement
en
figure
Sa
et
Sb.
{
<jJ(X)
=
(1
À)
X
G(p)
=
;2
4
(11
)

(12)
R'!
~'
~U*
--+
$(
e,de/dt) u
ue
s
r----
--
G(p)
r---
/[\
'-
ti/dt
r---
·M
de/dt
'------'
Figure
4:
Structure du contrôleur à
commutation
optimale
Le
calcul
de
À
[4]
fait
apparaitre
une
dépendance
de
À
par
rapport
aux
conditions
initiales
du
;ystème.
Pour
s'en
affranchir,
on
prendra
non
plus
<jJ(X)
donne
par
(11)
mais
<jJ(X)
telle
que
:lans
l'expression
(12)
et
la
commutation
sera
ainsi
optimale
quelles
que
soient
les
conditions
nitiales
[4].
1de 1de 1
<jJ(X)
=e+- - -
2a dt dt
~ette
fonction
quadratique
de
commutation
peut
être
réalisée
par
un
simple
retour
quadratique
:le
la
sortie. Il
est
à
noter
que
si les
paramètres
de
la
fonction
de
transfert
varient,
on
obtient
alors
)lusieurs
phénomènes
possibles telles
que
la
réticence
(commutation
prématurée)
ou
encore
des
)scillations
dues
à
une
commutation
tardive
(figure 5). Ces
problèmes
posés
par
cette
méthode
;elle
qu'elle
a
été
exprimée
sur
cet
exemple
simple,
seront
résolus
dans
la
partie
suivante,
lOtamment
par
la
transformation
de
la
fonction
'ljJ(
u)
en
une
fonction
non
linéaire
progressive.
de/dt
Tardive
(a)
e
•Optirrwle
Sortie
(b)
Figure
5:
Réponse du
systéme
à
commutation
optimale
La
fonction
de
transfert
du
hacheur
en
mode
courant
muni
d'une
charge
linéaire
précédée
)ar
une
action
intégrale
peut
être
exprimée
par
(13).
K
{
G(p)
=
p(1+Tp)
avec
J{
=
!ff-
et
T=RchCs
5
(13)
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%