Schéma multirésolution pour la reconstruction 3D de petits corps

Schéma multirésolution pour la
reconstruction 3D de petits corps
Photoclinométrie par Deformation
Claire Capanna
Laboratoire LSIS (CNRS - UMR 7296 )
Domaine universitaire de Saint Jérôme - Avenue Escadrille Normandie Niemen,
13397 Marseille cedex 20
-
Laboratoire LAM (CNRS - UMR 7326 )
Pôle de l’Etoile, site de château Gombert - 38, rue Frédéric Joliot-Curie,
13388 Marseille cedex 13
clair[email protected]g
RÉSUMÉ. Lors de missions spatiales vers les petits corps, des images des astéroïdes et des co-
mètes sont prises par le système imageur de la sonde. À partir de ces images, il est souvent
nécessaire, pour les astrophysiciens ou géologues de reconstruire la forme en 3D. L’objectif de
cet article est de présenter une nouvelle méthode de reconstruction qui s’appuie sur la photocli-
nométrie. Elle est basée sur la déformation d’un maillage au cours d’une boucle d’optimisation
afin que les images synthétiques obtenues soient les plus proches possibles des images obser-
vées. Pour garantir la convergence et donc augmenter la robustesse de cette reconstruction 3D,
un schéma de multirésolution a été mis en place.
ABSTRACT. During space missions toward small bodies, images of asteroids and comets are
taken by the imaging system onbord the spacecraft. Astrophysicists and geologists often need
to reconstruct the 3D shape from these images. The objective of this article is to present a
new photoclinometric reconstruction method based on the deformation of a mesh during an
optimisation process to match synthetic images with observed images. In order to insure the
convergence and therefore to increase robustness, a multiresolution scheme is used.
MOTS-CLÉS : Reconstruction 3D, maillage 3D, déformation, optimisation, multirésolution,
photoclinométrie
KEYWORDS: 3D reconstruction, 3D mesh, deformation, optimization, multiresolution,
photoclinometry
JDL’6 12 - C. Capanna -Schéma multirésolution pour la reconstruction 3D de petits corps,
pages 1 à 12

2 JDL’6 12 - C. Capanna -Schéma multirésolution pour la reconstruction 3D de petits corps
1. Introduction
Ce travail se situe dans le cadre de la mission Rosetta de l’Agence Spatiale Euro-
péenne. Le principal objectif de cette mission est l’observation, à partir d’une mise en
orbite, d’une comète à partir d’août 2014. Cette observation permettra de caractériser
les propriétés physiques et chimiques de la comète. Pour observer la comète, la sonde
est équipée de 12 instruments dont un système imageur appelé OSIRIS (Optical, Spec-
troscopic, and Infrared Remote Imaging System) réalisé en partie au LAM. De plus,
la sonde est équipée d’un atterrisseur appelé Philae qui sera envoyé à la surface de la
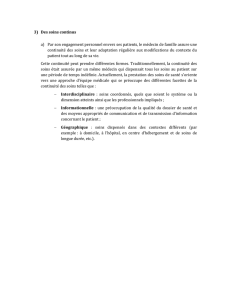
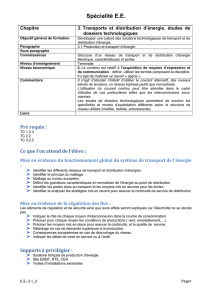
comète. La sonde Rosetta a survolé deux astéroïdes (cf. Fig. 1) au cours de son voyage
vers la comète.
Dans un premier temps, la reconstruction de la forme globale du noyau de la co-
mète est nécessaire afin de permettre les calculs de trajectoire et de mise en orbite de
la sonde autour de la comète. Ces calculs ne nécessitent qu’un modèle basse résolu-
tion de centaines de milliers de facettes. Dans un second temps, l’un des défis de la
mission Rosetta est la reconstruction de la forme globale du noyau de la comète avec
une précision d’un mètre environ. Ceci implique la création d’un modèle haute réso-
lution contenant des millions de facettes. Ensuite, le modèle topographique précis de
la surface doit être exploité afin de calculer différentes propriétés physiques de l’objet
dont le volume, la surface et les paramètres rotationnels.
Finalement, la reconstruction 3D de la comète doit permettre de détecter de ma-
nière automatique des zones d’atterrissage possible pour le module Philae. Une pré-
sélection automatique de zones plates (∼5 zones) devra donc être développée. Un
MNT (“Modèle Numérique de Terrain") haute résolution devra être calculé pour cha-
cune d’entre elles. Une précision de 10 cm sera alors souhaitée afin de choisir le site
d’atterrissage offrant le maximum de chances de succès.
Les images observées obtenues ont différentes résolutions, selon le moment où
elles ont été prises : lors de l’approche ou lors d’un passage au plus près, et selon
la caméra. Ces images de différentes résolutions permettent de reconstruire l’objet à
différentes résolutions. Le modèle de forme reconstruit est décrit par un maillage à
facettes triangulaires. En effet, il est important de noter que la résolution du modèle
est liée à celle des images. Un pixel ne doit pas correspondre à un trop grand nombre
Figure 1. Images observées des deux astétroïdes survolés par Rosetta : Steins
(gauche) et Lutetia (droite)

JDL’6 12 - C. Capanna 3
de facettes sinon, étant donné que son signal correspond à la moyenne des contribu-
tions de chaque facette, les facettes ne sont pas assez considérees individuellement.
Le meilleur rapport est de 2 à 3 facettes par pixel. Dans un maillage triangulaire, le
nombre de facettes est approximativement égal au double du nombre de sommets. En
choisissant ce rapport de 2 à 3 facettes par pixel, nous nous assurons d’avoir autant de
paramètres (nombre de sommets) que d’observables (nombre de pixels).
Nous présentons, dans cet article, une nouvelle méthode de photoclinométrie
consistant en une déformation d’un maillage triangulaire au sein d’une boucle d’op-
timisation non-linéaire. Cette méthode permet d’obtenir le modèle basse résolution.
À partir du maillage, des images synthétiques sont créées. Le maillage est déformé
jusqu’à ce que les images synthétiques correspondant au maillage correspondent aux
images observées en suivant un schéma multirésolution. Après un état de l’art des
méthodes, nous décrirons les apports scientifiques de ce travail. Nous présenterons
ensuite une conclusion et quelques perspectives.
2. Etat de l’art
2.1. Méthodes de reconstruction 3D à partir d’images
Il existe plusieurs méthodes de reconstruction 3D à partir d’images. Les plus uti-
lisées, pour la reconstruction de petits corps en astrophysique, sont la stéréoscopie, la
photogrammétrie et la photoclinométrie.
Stéréoscopie : la stéréoscopie (stéréo) est la méthode de reconstruction 3D la
plus utilisée. Elle se décompose en plusieurs étapes : la détection de points ou sché-
mas remarquables (Harris et al., 1988, Smith et al., 1997) appelés points d’intérêt,
l’appariement de ces points (Bhat et al., 1998) et le calcul des points 3D correspon-
dants (Delvit et al., 2006). Les méthodes de stéréo permettent d’extraire un nuage de
points de contrôle (P C) à partir des points schémas d’intérêt (Simonelli et al., 1993).
Photogrammétrie : la photogrammétrie s’apparente à la stéréo avec pour dif-
férence le fait que la photogrammétrie cherche à corréler des imagettes (en anglais
”patches”) entières d’une image de référence dans une autre image sans prendre en
compte forcément des points d’intérêt. La photogrammétrie cherche à trouver les opé-
rations (translations, rotations, distorsions) permettant de passer d’une image à l’autre
afin de déduire la forme 3D de l’objet observé. L’article (Giese et al., 1996) décom-
pose la méthode de photogrammétrie en trois étapes : l’ajustement des paramètres
d’orientation des images ou rectification, la détermination des points conjugués dans
les différentes images (méthode de corrélation par moindres carrés avec une taille
des imagettes optimale à déterminer) et la génération d’un MNT. L’équipe du DLR (
“Deutschen Zentrum für Luft- und Raumfahrt" , agence spatiale allemande), à partir
d’une méthode de photogrammétrie (Oberst et al., 2004), a reconstruit le noyau de la
comète 9P/Borelly à partir des images prises pendant la mission DEEP SPACE 1. Ces
méthodes permettent de reconstruire des objets complexes mais les temps de calcul
sont des inconvénients et peuvent être améliorés grâce à la multirésolution ou par une

4 JDL’6 12 - C. Capanna -Schéma multirésolution pour la reconstruction 3D de petits corps
méthode hybride de “shape-from-shading" et stéréo : méthodes de stéréophotogram-
métrie (Gwinner et al., 2007).
L’un des inconvénients de cette méthode est, tout comme pour la stéréo, la néces-
sité de disposer d’images prises sous des angles différents et présentant un objet avec
une texture importante. Un autre inconvénient est que cette méthode ne prend pas en
compte les ombres portées.
Photoclinométrie : la photoclinométrie (appelée par abus de langage “shape-
from-shading") fut introduite par Horn (Horn, 1970). Elle consiste à déterminer les
pentes des facettes d’un objet d’une scène 3D à partir de l’intensité des pixels de
l’image. Lorsqu’un objet est éclairé, l’intensité lumineuse renvoyée à l’observateur
dépend des positions de la source lumineuse et de l’observateur, mais également de
la forme de l’objet et de sa réflectance. La photoclinométrie est un problème inverse
mal posé (retrouver la forme 3D à partir d’une information 2D) pour lequel il n’existe
aucune solution unique sans ajout de contraintes et d’hypothèses. Il existe alors diffé-
rentes approches : les approches par minimisation (Peleg et al., 1990), les méthodes
de propagation (Horn, 1970), les méthodes par approches locales (Lee et al., 1985) et
les approches linéaires (Tsai et al., 1994). À partir d’images d’une même zone prises
sous différents points de vues ou avec des conditions d’illumination différentes, la sté-
réophotoclinométrie a permis de reconstruire différents petits corps de notre Système
Solaire dont l’astéroïde Itokawa observé par la sonde Hayabusa (Gaskell et al., 2006).
Des problèmes de temps de calcul se posent également et l’utilisation de la stéréo
est aussi source d’amélioration comme pour la stéréophotoclinométrie SP C (Gaskell
et al., 2006). Ces méthodes permettent alors d’obtenir des modèles haute résolution
(de millions de facettes) de précision équivalente à celle de la stéréophotogrammé-
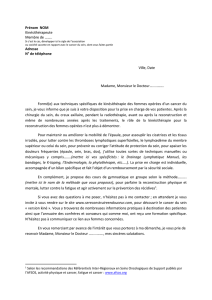
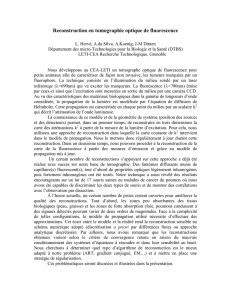
trie. Ces méthodes présentent également quelques limitations. Pour les modèles ob-
tenus par ces méthodes, certaines hautes fréquences ne sont pas reproduites. Certains
sillons et cratères ne sont pas reconstruits avec la méthode de SPC de R. Gaskell. Ainsi
comme nous pouvons le voir sur Fig. 2, les sillons les moins profonds ne sont pas re-
construits (flèche grise) et les plus profonds comme celui sur la gauche de l’image ne
sont pas assez creusés (flèche blanche). Il en est de même pour les cratères. De plus,
Figure 2. Images observée et image
synthétique du modèle SPC illustrant
les problèmes de hautes fréquences
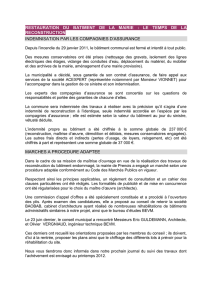
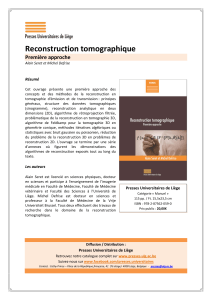
Figure 3. Images observée et image
synthétique du modèle SPC illustrant
les problèmes de silhouette

JDL’6 12 - C. Capanna 5
il y a parfois des problèmes de prise en compte des limbes1/ terminateurs2. Ainsi
comme le montre la silhouette au niveau du haut de l’objet sur Fig. 3, la forme de
l’objet n’est pas correctement reconstruite. La silhouette du modèle SPC est plus lisse
que celle de l’objet. De plus, l’automatisation de ces méthodes est très difficile.
2.2. Création des images synthétiques
Les images synthétiques sont créées par un outil appelé OASIS (Optimized As-
trophysical Simulator for Imaging Systems, (Jorda et al., 2010)) . OASIS considère
un modèle de forme décrit par un maillage. Les intersections entre les facettes et les
pixels (p, q)des images nsont calculées et le signal SIn(p, q)reçu par chaque pixel
est donné par la somme des contributions des facettes présentes dans le champ de vue
du pixel en fonction des paramètres photométriques de la surface. Les images sont
ensuite convoluées par la fonction d’étalement de l’instrument.
2.3. Multirésolution
Comme nous l’avons dit, précédemment, les images observées obtenues ont dif-
férentes résolutions et à partir de ces images, il est possible de reconstruire l’objet
à différentes résolutions. Il existe différents schéma de multirésolution (cf (Briggs et
al., 1987) par exemple) et pour les problèmes non linéaires, nécessitant une bonne
approximation pour point de départ, le schéma "Cascading Multigrid" (schéma as-
cendant direct) n’est pas celui qui donne les meilleurs résultats (Hackbusch, 1985).
Il est en effet préférable de choisir un schéma qui présente des aller-retours dans les
différentes résolutions. Le schéma de multirésolution de la méthode "Full Multigrid"
(Botsch et al., 2007) consiste, avant de s’intéresser à une résolution supérieure non
encore traitée :
- à redescendre à la résolution de départ en passant par toutes les résolutions intermé-
diaires, puis
- à utiliser un schéma ascendant direct pour atteindre la résolution voulue en passant
une fois de plus par toutes les résolutions intermédiaires .
Ce schéma multirésolution est illustré par Fig. 4.
Figure 4. Schéma de multirésolution "Full Multigrid"
1. Limbe : limite physique de l’objet
2. Terminateur : limite jour/nuit de l’objet
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%