Commande d`un moteur à courant continu à aimant permanent par

1
Commande d’un moteur à courant continu à aimant permanent par
hacheur mono quadrant piloté avec un circuit spécialisé 3525
1. Hacheur avec Commande par un Générateur Basse Fréquence (GBF).
Fréquence de 20 kHz, (> à 18 kHz, limite de l’audition)
Pour ne pas entendre le sifflement
Caractéristiques Transistor MOS :
Vcc= +12V
VM
VG
VDS
VG
10 v
α
T
T
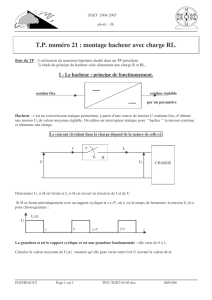
Ce hacheur n’est pas réversible en courant et en
tension, le transistor MOS et la diode étant
Unidirectionnel en courant, et la tension est
imposée par l’alimentation fixe
La tension moyenne aux bornes du moteur permet
de contrôler sa vitesse( E= K )
le GBF doit avoir une amplitude comprise entre
10 et 20 V pour obtenir une saturation correcte du
transistor MOS (inferieur a 10 V, la résistance
RDSon est trop importante et au delà de 20 V, on
détruit le transistor)
la diode de roue libre permet au courant
emmagasiner dans les inductances du moteur et
du couple électromagnétique de continuer à
circuler lorsque le transistor est bloqué sans
détruire celui ci en forçant le passage.

2
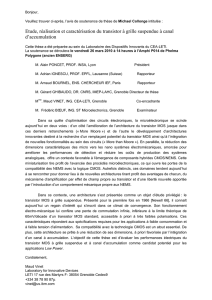
Vérification du Fonctionnement :
Lorsque le transistor conduit, on retrouve une tension nulle à ses bornes et toute la tension
d’alimentation aux bornes du moteur. Lorsque le transistor est bloqué, le courant passe par la
diode de roue libre, la tension aux bornes du moteur est égale a la tension de seuil de la diode
(0,8V)
Cas de la conduction discontinu :
Si le couple résistant n n’est pas assez important
Le courant s’annule dans le moteur après la phase
de roue libre. On retrouve alors la fem du moteur
(E) a ses bornes.
Quand le MOS conduit :
VM= 12 V (tension d’alimentation)
Quand la DRL conduit :
VM= -0,8 V (tension de seuil de la diode)
VGS
10 V
12,8 V
V
DS
CH1 = V
GS
CH2 = V
M
VM
12 V
- 0,8 V
CH1= VGS CH2 = VDS
CH1 = VDS CH2 = IM
VGS
I
M
MOS DRL
1A
0,8 A
Quand le MOS conduit, La bobine du
moteur emmagasine de l’énergie,
qu’elle restitue dans la diode roue
libre quand le MOS est bloqué.
CH1= IM CH2 = VM
I
M
=0
E = K
MOS
DRL

3
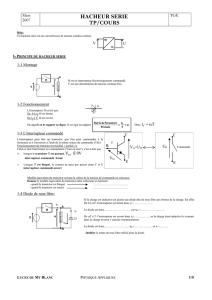
Courbe V
M
=f ()
Avec VM Tension moyenne aux bornes du moteur mesurer au voltmètre en position DC
Rapport cyclique mesuré sur VM à l’oscilloscope
VM (V)
2,4 0,2
4,7 0,4
7,3 0,6
9,6 0,8
On trouve une droite de la forme
Y = A .x
Ce qui est conforme à la théorie du Hacheur :
U = .E
VM = 12 .
Courbe N =f ()
Le moteur ayant des vitesses de rotation lente, la mesure de vitesse avec le stroboscope est très
délicate (voire impossible), nous n’avons pas pu faire de relever satisfaisant.
2. Etude du circuit spécialisé SG 3525:
Objectif : remplacer le GBF par circuit capable de fabriquer un signal de commande (rapport
cyclique variable) pour le transistor MOS
V
M
0,4 0,8
9,6
4,7

4
SG 3525A
1
9
5
6
7
16
10
11
14
12
8
13
15
2
Sortie
12 V
470
Ω
470
Ω
C
1
R
1
C
2
En prenant C1= 15 nF
Déterminons R1 pour avoir une
fréquence d'oscillation de 20 kHz.
D’après la doc technique nous avons
la relation suivante :
Avec CT = C1 RT=R1 RD=0
D’ou R1 = 4,7 k
Principe utilisé pour « fabriqué » un rapport cyclique variable :
On compare un signal triangulaire avec une tension continu variable
Calcul de C2 pour avoir une durée de démarrage égale à 5 secondes
D’après le schéma interne du 3525, on constate que le Condensateur C2 est alimenté par un
courant constant :(50 µA) jusqu’atteindre la tension de 3,3 V (maximum duty cycle)
I = C dv/dt d’ou C2 = 50 10-6* 5 / 3,3 = 75µF On choisi un condensateur de 100µF
Adaptateur
Comparateur
Vs (commande de
l'interrupteur de puissance)
Vs
Ve
VC2
t
3,3 V
5 s
C2
Ve
Vs
T T
t
t

5
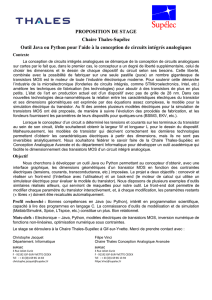
CH1 = V2 CH2= V5 RefA = V13
12 V
3,3 V
1,6 V
0,9 V
V13
sortie
V5
V
C1
V2
Vérification du fonctionnement du circuit 3525 :
V2= tension de commande (consigne)
V5= tension triangulaire de fréquence 20kHz (conforme au couple R1 C1 calculé)
V13= tension de sortie, dont le rapport cyclique varie lorsque l’on augmente ou diminue la
tension de consigne V2
Vérification du temps de démarrage :
On positionne la commande de façon à avoir le rapport cyclique minimum. On éteint et on
rallume l’alimentation et on chronomètre le temps mit pour atteindre ce rapport cyclique :
On mesure 6s, (théorie :5s), On trouve un temps plus grands puisque l’on a mit un condensateur
plus grand que celui calculer (100 ou lieu de 75µF calculé)
Courbe = f (V
2
)
On mesure V2 au voltmètre, rapport cyclique de la tension de sortie (V13) sur l’oscilloscope
V2
0,8 3,4
2
1
0,5
Cela correspond bien au donner constructeur ;
V2 compris entre 0,7 et 3,6 pour = 1 et 0
Equation : = a.V2 +b avec a = -1/(3,4 – 0,8)
b = - 3,4.a
= - 0,38.V2 + 1,3
 6
7
8
6
7
8
1
/
8
100%