moteur a courant continu banc leroy somer

Tle STI GET nom : nom du binôme :
Page 1 sur 3
M
MO
OT
TE
EU
UR
RA
AC
CO
OU
UR
RA
AN
NT
TC
CO
ON
NT
TI
IN
NU
U
B
BA
AN
NC
CL
LE
ER
RO
OY
YS
SO
OM
ME
ER
R
R
RE
EL
LE
EV
VE
ER
RL
LE
ES
SI
IN
ND
DI
IC
CA
AT
TI
IO
ON
NS
SS
SU
UR
RL
LA
AP
PL
LA
AQ
QU
UE
ES
SI
IG
GN
NA
AL
LE
ET
TI
IQ
QU
UE
E
P: ……………. kW Induit :U= …………… V Inducteur :Ue= …………… V
n= ……………tr.min-1 I=…………….. A Ie= ……………...A
C
CO
ON
NS
SI
IG
GN
NE
ED
DE
ES
SE
EC
CU
UR
RI
IT
TE
E
oAucune mise sous tension sans vérification préalable du montage par le professeur.
oAucune modification du montage sous tension.
oLaisser l'inducteur sous tension alors que le moteur ne tourne plus provoque sa
déterioration par échauffement excessif(absence de ventilation)
oToujours maintenir l'inducteur sous tension nominale lorsque l'induit est sous
tension (risque d'emballement du moteur).
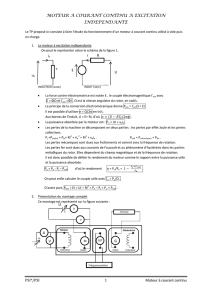
PROCEDURE DE DEMARRAGE
1. Mettre sous tension le ventilateur du frein à poudre
2. Mettre à zéro le potentiomètre de l'alimentation de l'induit du moteur à courant
continu.
3. Mettre sous tension le circuit inducteur du moteur à courant continu.
4. Mettre sous tension le circuit induit du moteur à courant continu.
5. Régler la tension de l'induit à sa valeur nominale.
PROCEDURE D'ARRET
1. Ramener à zéro la charge mécanique
2. Ramener à zéro la vitesse du moteur en réduisant la tension de l'induit et couper
l'induit.
3. Couper l'inducteur.
M
ME
ES
SU
UR
RE
ED
DE
EL
LA
AR
RE
ES
SI
IS
ST
TA
AN
NC
CE
EA
AL
L’
’I
IN
ND
DU
UI
IT
T(
(r
ro
ot
to
or
rb
bl
lo
oq
qu
ué
é)
)
excitation
induit
A
V
0 – 250 V
U
I
Le rotor est bloqué,
augmenter la tension
jusqu’à obtenir I=INet
relever la valeur de la
tension U. En déduire la
résistance de l’induit.
U= ……………………. I= ……………………….. R= ……………………

Tle STI GET nom : nom du binôme :
Page 2 sur 3
C
CA
AR
RA
AC
CT
TE
ER
RI
IS
ST
TI
IQ
QU
UE
ES
SA
AF
FL
LU
UX
XC
CO
ON
NS
ST
TA
AN
NT
T(
(c
co
ou
ur
ra
an
nt
te
ex
xc
ci
it
ta
at
ti
io
on
nc
co
on
ns
st
ta
an
nt
t)
)
Réaliser le montage ci-dessus avec un tachymètre. Vérification par le professeur.
Relever la vitesse de rotation nen fonction de la tension de l’induit et les paramètres
suivants : Ue,Ie,U,I,P1, et P2.
Tracer et modéliser la courbe n=f(U).
Tracer et modéliser U= f(I).
A partir de l’expression E=U–R.I, tracer E= f(n)
On définit les pertes Joule à l’induit Pji à partir de l’expresssion Pji =R.I² et les pertes
Joule à l’inducteur Pje =Ue.Ie. Les puissances fournit au moteur sont données par les deux
wattmètres (Pa=P1+P2). On définit les pertes constantes à partir de l’expression :
Pc=Pa–Pje -Pji . Calculer Pcpour toutes les valeurs de Uet tracer Pc=f(n)
On définit le couple de pertes Tptel que Tp=
n
PP cc
.
30.
. Tracer Tp= f(n)
C
CA
AR
RA
AC
CT
TE
ER
RI
IS
ST
TI
IQ
QU
UE
ES
SA
AF
FL
LU
UX
XV
VA
AR
RI
IA
AB
BL
LE
E(
(c
co
ou
ur
ra
an
nt
te
ex
xc
ci
it
ta
at
ti
io
on
nc
co
on
ns
st
ta
an
nt
t)
)
Réaliser le montage ci-dessus avec un tachymètre et un rhéostat de 330 .Vérification
par le professeur.
avec le rhéostat en butée (à 0), mettre sous tension et à vitesse n= 1000 tr/min. En
modifiant uniquement la position du curseur du rhéostat (sans toucher aux alimentations),
excitation
induit
W
A
W
A
V
0 – 250 V
220 V
Ie
UeU
I
V
330
excitation
induit
W
A
W
A
V
0 – 250 V
220 V
Ie
UeU
I
V
P1P2

Tle STI GET nom : nom du binôme :
Page 3 sur 3
relever toutes les grandeurs électriques et mécaniques. POUR ETEINDRE, remettre le
rhéostat à 0, diminuer l’induit et éteindre les deux alimentations.
Tracer et modéliser la courbe Ue= f(Ie). En déduire la résistance de l’inducteur Re
Re= ………………………..
Tracer la courbe n= f(Ie).
Calculer Pcet tracer Pc=f(n)
Calculer Tpet tracer Tp= f(n).
Tracer et modéliser Tp= f(Ie). En déduire Tpà vide Tpv = …………………….
C
CA
AR
RA
AC
CT
TE
ER
RI
IS
ST
TI
IQ
QU
UE
ES
SE
EN
NC
CH
HA
AR
RG
GE
E
Réaliser le montage ci-dessus avec un tachymètre, un capteur de couple et un frein à
poudre. Vérification par le professeur.
Mettre le moteur au point de fonctionnement nominal. Freiner le moteur et relever toutes
les grandeurs électriques et mécaniques. Pour éteindre, n’oublier pas de ramener le frein à
zéro, et suivre le protocole d’arrêt.
Tracer et modéliser Tu= f(I), I=f(n) et Tu= f(n).
Tracer et modéliser n=f(U). Superposer cette courbe à celle faite à « flux constant ».
Calculer le rendement =
a
u
P
Pet tracer = f(I) et = f(n)
excitation
indu
it
W
A
W
A
V
0 – 250 V
220 V
Ie
Ue
U
I
V
1
/
3
100%