Press release

Legal form:
Limited partnership
Registerred office: Esslingen a. N.
Register court Stuttgart
COR 211583
Value added tax id. number:
DE 145 339 206
General partner:
Festo Management
Aktiengesellschaft
Registered office: Vienna/Austria
Commercial registered court:
Commercial court Vienna
COR FN 303027 d
Board of Director:
Dipl.-Kfm. Alfred Goll
Dr. Claus Jessen
Dr. Ansgar Kriwet
Dipl.-Kfm. Michael Mölleken
Dr. Eberhard Veit (Chairman)
Chairman of the Supervisory Board:
Prof. Dr.-Ing. Dr.-Ing. E.h. Klaus
Wucherer
Festo AG & Co. KG
Postfach
73726 Esslingen
Phone +49 711 347-4032
Fax +49 711 34754-4032
[email protected]esto.com
www.festo.com
Ruiter Straße 82
73734 Esslingen
GERMANY
Communiqué de presse PVSEC 01/2013
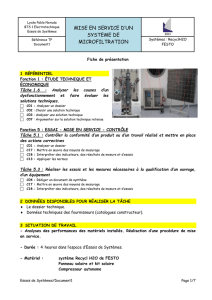
Manipulateur à grande vitesse sans contact désormais deux
fois plus rapide
Double table cartésienne en H pour transfert super-rapide de wafers
La table en H à grande vitesse bat tous les records de vitesse. Elle est 30 % plus
rapide que n’importe quel manipulateur cartésien classique – et ce pour un prix
d'achat comparable. Festo a développé ce manipulateur à grande vitesse pour les
opérations d'assemblage dynamiques en photovoltaïque, où des articles de grande
série légers et de petite taille doivent être positionnés rapidement et en souplesse.
Avec même désormais une cadence nettement supérieure dans la version double table
en H.
Cette table à deux ou trois dimensions couvre un espace de travail de forme rectangulaire
nettement plus grand que celui des systèmes robotiques en cinématique delta, lesquels ne
peuvent évoluer que dans espaces de travail circulaires ou réniformes. Les inconvénients de
beaucoup de robots delta sont aussi leur coût élevé, la masse à installer d’environ 150 kg et
l’emprise importante nécessaire à leur montage.
Plate, rapide, précise
La table en H à grande vitesse, elle, est très plate, a un centre de gravité bas et un bâti plus
simple que celui des robots delta rapide. Son comportement optimisé à l’accélération et au
freinage lui permet d’afficher une précision de 0,1 mm à l’aspiration et à la préhension.
La table atteint sa vitesse de 5 m/s et son accélération de 50 m/s² grâce à une astuce de
conception : les deux axes à courroie crantée EGC sont reliés à la traverse par une seule
courroie crantée engrenant l'arbre d'entraînement. Ce dernier est entraîné par deux
servomoteurs EMMS. Effet secondaire positif : aucun moteur n'a besoin d’être entraîné
dans le plan X/Y, avec ses deux degrés de liberté. La réduction des masses permet des
mouvements rapides et dynamiques et entraîne moins d'usure.
La double table en H permet désormais de moduler les performances : par combinaison
intelligente de deux tables au niveau de la mécanique et de la commande, il est possible
d’augmenter la cadence jusqu’à 6000 wafers à l’heure.
Préhension quasiment sans contact
Le préhenseur à effet Bernoulli saisit les pièces sans contact, comme par exemple des wafers
à base de silicium, par application d’une surpression sur le préhenseur lui-même. Dans le
même temps, une dépression est générée sur la surface à saisir en vue d’aspirer le wafer.
Date
1st October 2013
Our reference
TM-IP/HAUG

L’ensemble de la pièce est ainsi happée par le préhenseur jusqu’à l’équilibrage de la force
émanant de la pression dynamique issue de la tuyère et de la force d’attraction émanant de
l’impulsion d’accélération du fluide. Il en résulte un certain interstice (d’environ 0,5 mm à
3 mm) entre préhenseur et surface à saisir de la pièce, assurant ainsi le maintien sans
contact de l’objet.
Robotique pour solutions systèmes
À la base du manipulateur, figure la commande robotique CMXR. Elle réunit la mécanique
ainsi que les actionneurs et organes de commande électriques en une solution système
cinématique complète et coordonne les mouvements à haute dynamique dans l’espace. La
CMXR joue aussi le rôle d’interface, d’une part avec les commandes de niveau hiérarchique
supérieur et, d’autre part, avec les contrôleurs des servomoteurs des axes et avec les
terminaux de distributeurs. Qui mieux est : la commande permet d’intégrer des systèmes de
traitement d’image, comme le système intelligent de caméra compacte SBO..-Q de Festo. Ce
système vidéo et les systèmes de convoyeurs également disponibles permettent aussi de
réaliser des applications à objets en mouvement.
La solution système, entièrement assemblée et vérifiée, est livrée prête à monter au pied
même de la machine. Accompagnée de toutes les données de conception et de tous les
schémas, et assortie d’une garantie de bon fonctionnement et de prix ferme. L’utilisateur
reçoit non seulement le matériel sous forme de sous-ensemble ou sous-système prêt à
raccorder, il bénéficie d’un ensemble complet de création de valeur ajoutée. Les solutions
complètes simplifient la tâche des fonctions techniques, minimisent les études, facilitent les
approvisionnements et font baisser le coût des process.
À propos de Festo
Festo est à la fois « global player » et entreprise familiale indépendante, ayant son siège à
Esslingen, sur le Neckar. L’entreprise fournit des équipements pneumatiques et électriques
à 300 000 clients de l’automatisation des usines et des process dans plus de 200 secteurs. 16
200 personnes travaillent ainsi dans 61 sociétés nationales et ont réalisé en 2012 un chiffre
d’affaires d’environ 2,2 milliards d’euros. 9 % de cette somme est investi chaque année dans
la recherche et le développement. Quelque 30 000 produits figurent au catalogue dans
plusieurs centaines de milliers de variantes et sont disponibles dans 176 pays du monde
entier, ainsi qu’environ 10 000 solutions réalisées chaque année sur mesure. Dans cette
entreprise-école, la part de la formation initiale et continue représente 1,5 % du chiffre
d’affaires. Les offres de formation ne s’adressent cependant pas seulement au personnel :
Festo Didactic GmbH fait aussi entrer l’automatisation dans des programmes de formation
initiale et continue destinés aux clients, étudiants et apprentis.

À ce sujet:
Photo de presse Festo H-Portal 1
Légende:
Manipulateur à grande vitesse sans contact : la table cartésienne
en H à grande vitesse bat tous les records de vitesse. Elle est 30
% plus rapide que n’importe quel manipulateur cartésien
classique – et ce pour un prix d'achat comparable. (Photo : Festo
AG & Co. KG)
À ce sujet:
Photo de presse Festo H-Portal 2
Légende:
Cette nouvelle table à deux ou trois dimensions couvre un espace
de travail de forme rectangulaire nettement plus grand que celui
des systèmes robotiques en cinématique delta, lesquels ne
peuvent évoluer que dans espaces de travail circulaires ou
réniformes. (Photo : Festo AG & Co. KG)
À ce sujet:
Photo de presse Festo Double Table en H
Légende:
Double table en H : par combinaison intelligente de deux tables
au niveau de la mécanique et de la commande, il est possible
d’augmenter la cadence jusqu’à 6000 wafers à l’heure. (Photo:
Festo AG & Co. KG)

À ce sujet:
Photos de presse Festo OGGB et Module de Translation-
Rotation
Légende:
Saisir sans contact : le module de translation-rotation accélère à
20 m/s² à une vitesse de 1,5 m/s. Pour la manipulation de
modules solaires et autres pièces fragiles, le préhenseur à effet
Bernoulli OGGB est la solution idéale à monter sur le frontal du
module. (Photo : Festo)
Vous trouverez les communiqués et photos de presse sous www.festo.com/press.
1
/
4
100%