Aucun titre de diapositive

8 avril 2003 1
Tahiti 2003 :
Calcul efficace de
trajectoires
utilisant l'interversibilité


8 avril 2003 3
Problématique
diagnostic de systèmes dynamiques
calcul des événements sur le système
[Cordier::Largouët::2001]
planification
calcul des actions à appliquer sur le système
diagnostic planification
calcul de trajectoires sur un modèle
comportemental

8 avril 2003 4
Problème
Problème de l'explosion du nombre d'états
►utilisation des outils symboliques
(BDD, [Marchand::Rozé::2002])
►utilisation des techniques de model-checking
([Cordier::Largouët::2001])
►utilisation d'heuristiques (diagnostic
décentralisé [Pencolé::2001])

8 avril 2003 5
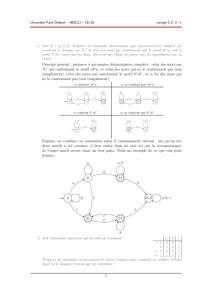
L’interversibilité
définition informelle
Définition d'une propriété sur les événements
Deux événements sont interversibles
si on peut les échanger dans une séquence
sous certaines conditions
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%

![Exercice 1 [Bac Liban 2016] : Solution page 1 Un automate peut se](http://s1.studylibfr.com/store/data/001876471_1-aac3bd8ca65b5f5251c8e166c1447a0c-300x300.png)