A1-Roulev

T.D. Analyse des systèmes du domaine technique PCSI
1. L’analyse du cahier des charges conduit à imposer une décélération maximale de 0,01 g, soit environ
0,1 m.s-2. Quels sont les critères du cahier des charges qui imposent cette décélération maximale ?
On peut modéliser le bateau comme un point matériel de masse 50 tonnes. Le bateau se comporte alors
comme un pendule de 6,5 m de longueur. Le balancement en charge pour le mouvement longitudinal est
limité à 100 cm. Avec ces contraintes, en appliquant le PFD au bateau on peut déterminer la décélération
maximale.
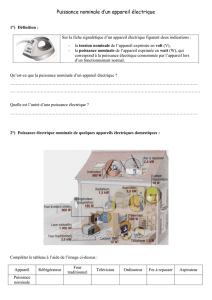
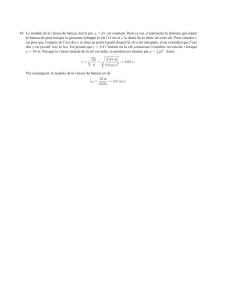
2. Supposons que le conducteur donne un ordre d’arrêt lorsque le ROULEV porte un bateau et se déplace à
sa vitesse nominale. Quelle sera la distance parcourue, entre l’instant où l’ordre est donné et l’instant
où le ROULEV sera effectivement arrêté ? Pour répondre à cette question :
prendre comme origine des temps l’instant où l’ordre est donné ;
poser V0 = la vitesse nominale supposée constante ;
commencer par représenter la fonction V(t), V étant la vitesse instantanée du ROULEV.
Cette distance vous paraît-elle compatible avec la précision de positionnement souhaitée ?
La vitesse nominale préconisée en charge est de V0 = 50 m/mn = 5/6 m / s
a = 0.1 m / s2
Commençons par déterminer tf.
L’accélération étant constante
0f
V a.t
donc
0
fV
ta
La distance parcourue à l’instant t :
t2
0
t
x(t) V(t).dt a. 2
Donc pour s’arrêter il faut d =
2
f
t
a. 2
=
2
0
V
2a
=3.4 m
La précision longitudinale demandée est de 100 cm = 1 m. Critère déjà au moins utile pour ne pas
tomber dans l’eau.
3. Il faut donc imposer un passage par une vitesse plus lente (appelée vitesse d’accostage) pour s’arrêter
avec la précision requise. Déterminer cette vitesse d’accostage ou plus précisément la vitesse maximale
d’accostage qu’il faudra adopter.
Cherchons la vitesse maximale d’accostage. Pour cela il faut se mettre dans le cas limite où le bateau
parcours les 1 m à partir de l’instant où en lui demande de s’arrêter. Il est évident que par mesure de
sécurité il faudra prendre moins.
V0
V(t)
t
0
0
tf

Nous avons les mêmes relations. Avec d = 1 m, Va à déterminer et a = 0.1 m /s2.
d =
2
a
V
2a
ainsi
aa
V 2ad
Va = 0.44 m
4. Le conducteur devra donc passer de la vitesse nominale à cette vitesse d’accostage suffisamment tôt.
On doit donc préconiser une distance minimale à partir de laquelle il faut engager la procédure d’arrêt.
Déterminer la distance parcourue par le ROULEV entre l’instant ou l’ordre est émis, le ROULEV se
déplaçant à la vitesse nominale, et l’instant où le ROULEV se déplace à la vitesse d’accostage.
Nous avons : da à déterminer, Va = 0.44 m/s, V0= 5/6 m/s et a = 0.1 m /s2.
Il est à peu près évident que la distance cherchée da = 3.4 m – 1 m = 2.4 m
Mais on peut la calculer.
a 0 a
V V at
donc
0a
aVV
ta
da =
0 a a
aa V V t
Vt 2
=
2
0 a 0 a
aV V V V
Va 2a
=
22
0a
VV
2a
= 2.4 m
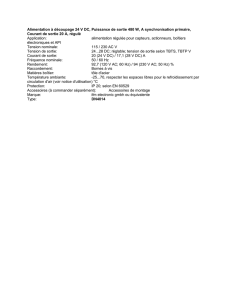
5. Pour des raisons de sécurité on majore cette distance de 50%. Supposons que la procédure d’arrêt
préconisée soit la suivante :
à t=0 la vitesse est constante et nominale ;
à partir de t=0 la décélération est constante et maximale pour atteindre la vitesse d’accostage ;
quand la vitesse d’accostage est atteinte elle est maintenue constante, jusqu’à ce que le ROULEV se
soit déplacé de la distance préconisée (majorée de 50%) à partir de t=0 ;
pour finir la décélération est constante et maximale jusqu’à l’arrêt.
Quel sera alors le temps total de la procédure d’arrêt.
Va
V(t)
t
0
0
ta
V0
Va
V(t)
t
0
0
tfa

0a
aVV
ta
;
a
21
V
tt a
;
a
1a a
d
tt 2V
Il faut 11 secondes pour s’arrêter. Ce qui semble raisonnable.
Il faudra préconiser d’engager la procédure d’arrêt à 3,6 m + 1m donc environ 5 m avant le point
d’arrêt.
6. Compléter la chaîne d’énergie et d’information du système d’entraînement en translation horizontal du
ROULEV.
Va
V(t)
t
0
0
ta
V0
Va
V(t)
t
0
0
ta
da
da + da/2
da + da/2 + 1
t1
t2
1
/
3
100%