partie a - Lycée Charles A. Coulomb

BAC STI Génie Electronique – Académie de Poitiers
Session 2005
LE CHARIOT FILOGUIDE
Page A1 / 7
PARTIE A
LE SYSTEME TECHNIQUE
« CONVOYAGE PAR CHARIOT »
ET L’OBJET TECHNIQUE DE REFERENCE
« LE CHARIOT FILOGUIDE SAXBY »
I - LE SYSTEME TECHNIQUE « CONVOYAGE PAR CHARIOT » .......................................................... 2
I - 1 - INTRODUCTION ........................................................................................................................................ 2
I - 2 - DIAGRAMME SAGITTAL ............................................................................................................................ 3
I - 3 - ETUDE DES MILIEUX ASSOCIES ................................................................................................................. 3
II - L’OBJET TECHNIQUE DE REFERENCE « LE CHARIOT FILOGUIDE SAXBY » ...................... 4
II - 1 - DESCRIPTION DU CHARIOT SAXBY ......................................................................................................... 4
II - 2 - DIALOGUE CHARIOT/ARMOIRE DE COMMANDE ........................................................................................ 6
II - 3 - FONCTION D’USAGE ................................................................................................................................. 7
II - 4 - SCHEMA FONCTIONNEL DE NIVEAU II ....................................................................................................... 7

BAC STI Génie Electronique – Académie de Poitiers
Session 2005
LE CHARIOT FILOGUIDE
Page A2 / 7
I - LE SYSTEME TECHNIQUE « CONVOYAGE PAR CHARIOT »
I - 1 - Introduction
Dans un hôpital, de nombreux transports sont assurés entre les services (Unités Techniques) et les
chambres des malades (Unités de Soins). Les services (UT) ne sont pas forcément proches des chambres
(US). A l’hôpital de GIRAC d’Angoulême, 4 chariots assurent les transports entre les différentes unités.
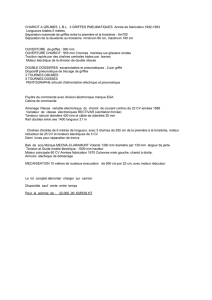
Un réseau relie les différents services, unités techniques et unités de soins :
Blanchisserie
Pharmacie
Déchets
Cuisine
SERVICES
Gares en
étages
Gares en
étages
Gares en
étages
Gares de
niveau
Gares de
niveau
14 Cantons
Linge propre
Linge sale
Repas
Retour plateau
Médicament
Déchets
Maternité
Chirurgie
Chirurgie
Monte charge D
Monte charge A
Monte charge G
6 UNITES TECHNIQUES
3 UNITES DE SOINS
CHAMBRES
Garage (Rechargement des batteries)
Le réseau est découpé en 14 cantons et points d’arrêts. Par canton, un seul chariot peut circuler à la fois.
Si le canton suivant est occupé, le chariot reste au point d’arrêt tant que celui-ci n’est pas libre. Une fois
le canton libéré le chariot peut repartir.
Les chariots filoguidés suivent un fil noyé dans le sol, parcouru par un signal électrique. Pour un
parcours simple, un seul fil de guidage est utilisé, pour un parcours plus complexe, on utilise plusieurs
fils émettant des fréquences différentes. Un itinéraire est obtenu en alimentant successivement les
cantons nécessaires au trajet demandé.
Certaines gares ne sont pas au même niveau. Les chariots devront donc emprunter des monte-charges.
Le garage permet le rechargement automatique des batteries après un cycle de fonctionnement.

BAC STI Génie Electronique – Académie de Poitiers
Session 2005
LE CHARIOT FILOGUIDE
Page A3 / 7
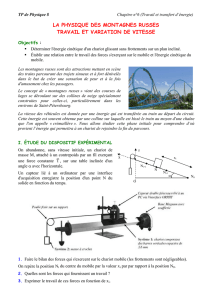
I - 2 - Diagramme sagittal
Changement de niveau
Chariot
filoguidé
Chariot
manutentionné
Montes-charges
Technicien de
maintenance
Manutentionnaire
Salle de charge
Obstacles
Fils enterrés
Balises
Magasin d’étage
Manutention
du chariot
Rangement Chariot
chariot manutentionné
à déplacer
Chariot rangé
Entretien
branchement
Salle de
commande
Champ magnétique
de référence B
Signaux électromagnétiques :
Identification du chariot
Signal de marche/ Arrêt.
Signal électrique calibré
Signaux électriques :
Identification du chariot
Signal de marche/ Arrêt.
Détection obstacles
Chargement
des batteries
Identique pour
chaque service
chariot manutentionné
déplacé
I - 3 - Etude des milieux associés
Milieu Humain
Sécurité totale pour les personnes.
Technicien spécialisé pour la maintenance.
Installation complète d’un circuit et de la gestion d’une flotte de chariots filoguidés.
Facilité de dépannage grâce au dialogue opérateur-chariot.
Diminution de pénibilité du travail.
Milieu technique
Pas d’obstacles aux autres manutentions et à la circulation du personnel.
Installation évolutive et flexible.
Milieu physique
Adaptation d’un circuit de chariots sans conducteur dans toutes sortes d’entreprises.
Milieu économique
Fabricant SAXBY.
Améliore la qualité de service.
Diminution du coût de fonctionnement de l’hôpital.

BAC STI Génie Electronique – Académie de Poitiers
Session 2005
LE CHARIOT FILOGUIDE
Page A4 / 7
II - L’OBJET TECHNIQUE DE REFERENCE « LE CHARIOT
FILOGUIDE SAXBY »
L’objet technique étudié est le chariot filoguidé. En suivant un fil de guidage au sol, il permet de
transporter d’un endroit à un autre les chariots manutentionnés. Ce type de transport permet :
- une diminution de la pénibilité du travail
- un gain de temps
- un gain d’argent (moins de personnel affecté à la manutention)
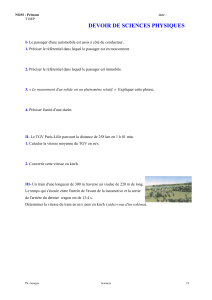
II - 1 - Description du chariot SAXBY
Structure interne d’un chariot :

BAC STI Génie Electronique – Académie de Poitiers
Session 2005
LE CHARIOT FILOGUIDE
Page A5 / 7
Les principaux éléments composant le chariot sont :
Deux moto réducteurs de traction sur les roues arrières.
Un moto réducteur de direction sur la roue avant.
2 moto réducteurs de levage qui actionnent les 4 vérins pour le levage du chariot de
manutention.
2 capteurs de guidage (1 avant et 1 arrière).
2 systèmes d’émissions par bobines.
2 ensembles de sécurité.
1 lecteur de plaque de codage.
3 capteurs d’arrêt (implantés sous le plateau de levage).
Des batteries.
Les informations provenant du fil sont captées par des bobines puis analysées pour permettre un
déplacement avant ou arrière à une vitesse régulée.
De plus les capteurs donnent la position du chariot par rapport au fil, ce qui commande l’orientation de
la roue directrice (asservissement de direction). La photo ci-dessous montre la chaîne de retour avec le
potentiomètre de recopie.
Les capteurs d’arrêt informent de la présence d’une charge à transporter. Le chariot passe alors en
petite vitesse puis s’arrête et la charge est soulevée.
Lorsque la charge est en place, le chariot peut lire la plaque de codage et donner tous les
renseignements à l’armoire de commande par l’intermédiaire de la bobine d’émission et du fil.
L’armoire de commande décide du parcours du chariot en fonction des informations reçues par
l’ensemble des chariots.
Si un chariot se présente devant un monte-charge, il informe celui-ci par la bobine émission en cabine.
Le dialogue s’effectue entre le chariot et le monte-charge.
 6
7
6
7
1
/
7
100%