1. Utiliser un Système à Microprocesseur

Royaume du Maroc
OFFICE DE LA FORMATION PROFESSIONNELLE ET DE LA PROMOTION DU TRAVAIL
Première Année
Programme de Formation des Techniciens Spécialisés en
Électronique
DIRECTION DE LA RECHERCHE ET INGENIERIE DE LA FORMATION
Septembre 1995
MODULE 11
Introduction aux Microprocesseurs
Résumé de Théorie
Télécharger tous les modules de toutes les filières de l'OFPPT sur le site dédié à la formation professionnelle au Maroc :
www.marocetude.com
Pour cela visiter notre site www.marocetude.com et choisissez la rubrique : MODULES ISTA

INTRODUCTION AUX MICROPROCESSEURS
RÉSUMÉ DE THÉORIE
Utiliser un Système à Microprocesseur.
TECCART INTERNATIONAL 2000 inc.
3155, boul. Hochelaga,
Montréal, Québec (Canada)
H1W 1G4
RÉDACTION
Serge Leblanc.
DESSINS ET CONCEPTION GRAPHIQUE
Serge Leblanc
RÉVISION TECHNIQUE
Pierre Asselin B.Sc. & Christian Lépine
RÉVISION LINGUISTIQUE
François Gaudreau
COMMISSION DE VALIDATION
Formateurs de l'OFPPT
Les droits de reproduction et de diffusion de ce document sont cédés par Teccart
International 2000 inc. à l’Office de la Formation Professionnelle et de la Promotion
du Travail du Royaume du Maroc, pour sa propre utilisation au Maroc.
Mis à part l’OFPPT, toute reproduction, en tout ou en partie, par quelque procédé
que ce soit, est interdite.
Mp_Rt1.Doc, imprimé à Montréal, le 26 mai 2017

TABLE DES MATIÈRES
1. UTILISER UN SYSTEME A MICROPROCESSEUR 1-1
1.1 Architecture interne d’un système à microprocesseur 1-1
1.1.1 Le microprocesseur 1-1
1.1.2 La mémoire 1-1
1.2 Les entrées/sorties 1-2
1.3 Les bus de communication 1-2
1.3.1 Le bus de données 1-2
1.3.2 Le bus d’adresses 1-2
1.3.3 Le bus de contrôle 1-2
1.4 Le microprocesseur 6809 1-3
1.4.1 Brochage du MC6809 1-3
1.4.2 Alimentation 1-4
1.4.3 Xtal et Extal 1-4
1.4.4 E et Q 1-4
1.4.5 RESET 1-4
1.4.6 MRDY 1-5
1.4.7 Bus de donnée D0 à D7 1-5
1.4.8 Bus d’adresses A0 à A15 1-5
1.4.9 R/W 1-5
1.4.10 /HALT 1-5
1.4.11 DMA/BREQ 1-6
1.4.12 BA et BS 1-6
1.4.13 NMI, FIRQ, IRQ 1-7
1.5 Décodage des adresses 1-7
1.5.1 Analyse d’un décodeur d’adresses 1-7
1.5.2 Cartographie du système Mod. E6809 1-8
1.5.3 Présentation de la cartographie 1-9
1.6 Architecture interne du microprocesseur 6809 1-10
1.6.1 L'unité arithmétique et logique 1-11
1.6.2 Les registres du 6809 1-11
1.7 Exercices 1-13

Résumé de Théorie Introduction aux Microprocesseurs
Système à Microprocesseur page 1-1 OFPPT/TECCART
1. Utiliser un Système à Microprocesseur
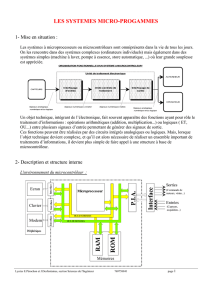
1.1 Architecture interne d’un système à microprocesseur
L'architecture interne d'un ordinateur se compose essentiellement de trois blocs: le
microprocesseur, la mémoire et les entrées/sorties reliées entre elles par trois bus de
communication; le bus de données, le bus d’adresses et le bus de commande.
Bus de données (8 lignes)
Mémoire
Unité centrale de
traitement
microprocesseur
Entrées/Sorties
Bus de contrôle
Bus d'adresses
Figure 1-1 Architecture interne d’un ordinateur
1.1.1 Le microprocesseur
Un microprocesseur est l'implantation en un seul boîtier, en technologie LSI ou VLSI,
d'une unité centrale de traitement de données CPU et d’une unité arithmétique et logique
ALU. Son principal travail est de fournir aux autres éléments, qui lui sont raccordés, la
synchronisation nécessaire et fonctionnelle du traitement des informations qui lui sont
acheminées.
1.1.2 La mémoire
C'est la partie où l'on retrouve les programmes exécutables et les données à traiter. Cette
section est subdivisée en deux; d'une part, il y a la mémoire latente et d'autre part, la
mémoire vive.
Mémoire morte
C'est la mémoire de lecture; elle contient le programme du système. L'avantage de la
ROM (Read Only Memory), c’est d'être permanente; son contenu ne disparaît pas quand
le système n'est plus alimenté. La ROM contient toujours un programme de chargement
initial ou un moniteur pour permettre le fonctionnement du système dès la mise sous
tension. Dans un contexte de contrôle de processus, presque tous les programmes
résideront en ROM car ils seront rarement changés et devront être protégés des pannes
d'alimentation.

Résumé de Théorie Introduction aux Microprocesseurs
Système à Microprocesseur page 1-2 OFPPT/TECCART
Mémoire vive
C'est la mémoire de lecture et d’écriture du système ou RAM (Random Access Memory).
Le contenu de ce type de mémoire est perdu lorsque l'on coupe l'alimentation. La
mémoire vive (RAM) doit être chargée, avant utilisation, à partir du clavier ou à partir
d’une mémoire de masse comme, par exemple, une unité à ruban magnétique ou une
unité à disque.
1.2 Les entrées/sorties
Les entrées/sorties sont nécessaires pour que le microprocesseur communique avec le
monde extérieur et, évidemment, avec l'utilisateur. Il serait tout à fait inutile de réaliser un
ordinateur sans qu'il y ait quelques entrées et quelques sorties afin de communiquer avec
l'extérieur.
1.3 Les bus de communication
Évidemment, pour que le système fonctionne, il doit y avoir une communication entre le
microprocesseur, la mémoire et les entrées/sorties. Cette communication est réalisée à
l'aide de trois bus qui regroupent les signaux, selon leur fonction.
1.3.1 Le bus de données
C'est un bus bidirectionnel (de 8 bits pour un 6809) sur lequel transitent les données
échangées par les éléments du système.
1.3.2 Le bus d’adresses
Il s'agit d'un bus unidirectionnel (de 16 bits pour un 6809), émanant du microprocesseur
et se propageant vers les dispositifs qu'il peut adresser. L'adresse qu'il porte permet
d'atteindre une case mémoire ou un registre spécifique avec laquelle une opération est
désirée.
1.3.3 Le bus de contrôle
C'est un groupe de lignes issues de ou allant vers le microprocesseur et reliant ce dernier à
d'autres dispositifs. Son rôle est de véhiculer les signaux destinés à assurer la
synchronisation et la commande de l'ensemble du système. Par exemple, la ligne Reset et
R/W (lecture/écriture), les lignes d'interruptions et l'horloge appartiennent à ce bus.
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%