Montage En nř1 - Les pages perso du Crans

Montage En nř1:
Amplificateurs d’instrumentation: application au conditionnement
de la mesure d’une température.
par Olivier Martin & Pierre Gérold
le 11 Février 2010
Table des matières
1 La température: une grandeur physique à mesurer . . . . . . . . . . . . . . . . . . . . 2
1.1 Les objectifs et difficultés mis en jeu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Comment mesurer une température? Introduction aux capteurs . . . . . . . . . . . . . . 2
2 Le conditionnement de la mesure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Immunité aux perturbations:le pont de Wheatstone . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Qui était Charles Wheatstone ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.2 Un principe simple et efficace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.3 Une structure améliorée: le demi-pont . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 L’amplificateur d’instrumentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Pourquoi un amplificateur différentiel? . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.2 Le TL081 en soustracteur : un amplificateur différentiel médiocre . . . . . . . . . 8
Les offsets introduits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Problème d’adaptation d’impédance . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Le taux de réjection en mode commun (CMRR) . . . . . . . . . . . . . . . . . . . 11
2.2.3 Un amplificateur plus performant: le INA114 . . . . . . . . . . . . . . . . . . . . . 12
3 Performances du thermomètre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1 Étalonnage du thermomètre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Rapidité et comparaison avec le thermomètre à thermocouple . . . . . . . . . . . . . . 14
3.3 Précision et domaine de validité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1

1 La température: une grandeur physique à mesurer
Nous proposons ici de faire une introduction sur les différentes problématiques liées à la
mesure de température. Nous serons alors ammener à expliciter le principe de fonctionnement
de trois capteurs utilisés pour la mesure de température et nous prédéterminerons quelle struc-
ture il faudra utiliser pour réaliser un conditionnement correct du signal électrique image de la
température.
1.1 Les objectifs et difficultés mis en jeu
Souvenons-nous que la notion de température est d’abord une notion physiologique et qu’elle
n’a pas de signification absolue au premier abord. Il existe plusieures échelles de température:
−L’échelle Celsius. Elle est définie par deux points: 0řC correspond au point de fusion
de la glace à une pression de 1 atm et 100řC correspond au point d’ébullition de l’eau à
une pression de 1 atm
−L’échelle Kelvin. C’est l’unité légale de température dans le Système International.
Elle est définie aussi par deux points: 0řK qui correspond au zéro absolu, température
correspondant à la mort thermique d’un système (il ne peut plus fournir de chaleur) et
273,16řK qui correspond au point triple de l’eau à 0,01 bar.
Il existe aussi d’autres échelles de température (Réaumur, Fahrenheit) mais nous nous n’y
intéresserons pas ici et nous utiliserons l’échelle Celsius. On peut aussi noter qu’une définition
possible de la température est la température cinétique, liée à la vitesse quadratique moyenne
des molécules , d’un volume mésoscopique de gaz parfait monoatomique. La température d’un
corps peut être définie alors par son équilibre thermique avec un gaz parfait monoatomique.
Nous savons que deux corps mis en contact à deux températures différentes tendent vers un
équilibre thermique. Si on place un troisième corps en contact avec ce système en équilibre, alors
l’ensemble des trois corps est en équilibre thermique: c’est le principe zéro de la thermodyna-
mique.
Cela permet de comprendre que la température est repérable, c’est-à-dire qu’on peut définir
l’égalité de deux températures. Néanmoins, cela ne la rend pas mesurable pour autant: il faut
être capable de définir un rapport de température. Il est donc nécessaire d’utiliser des instru-
ments qui sont capables de repérer la température et qui vont nous en donner une image qu’il
faudra traiter et convertir.
Nous proposons dans ce montage de mettre au point une chaîne de mesure qui nous per-
mettra de mesurer la température. Nous verrons alors que pour les capteurs utilisés, il est néces-
saire de traiter le signal provenant du capteur pour avoir en sortie une grandeur électrique image
de la température qui soit exploitable. On crée alors un thermomètre.
1.2 Comment mesurer une température? Introduction aux capteurs
Nous avons besoin d’un thermomètre, c’est-à-dire un système possédant une grandeur qui
varie toujours dans le même sens que la température (grandeur thermométrique) et qui peut
servir à repérer la température. C’est le cas par exemple d’un thermomètre à gaz (dihydrogène
ou hélium par exemple) à volume constant utilisé dans les laboratoires de métrologie.
2Section 1
Olivier Martin & Pierre Gérold École normale supérieure de Cachan

Dans notre cas nous allons utiliser un capteur qui permet de convertir la grandeur tempéra-
ture en une grandeur électrique. On distingue des capteurs optiques (pyromètre, caméra ther-
mique), mécaniques (dilatation d’un métal ou d’un liquide) et électriques (thermistance, sonde à
résistance de platine et thermocouple) mais dans notre montage nous avons utilisé une sonde à
résistance de platine. On peut néanmoins expliciter le principe de fonctionnement des autres
capteurs électriques:
−les thermistances: il s’agît de résistances dites CTN constituées d’oxydes métalliques
dont la résistivité décroit en fonction de la température (ρ=AeB/T). Leur coefficient de
température est alors α=1
ρ
dρ
dT =−B
T2. Il existe aussi des thermistances dites CTP à coef-
ficient de température positif.
−les couples thermoélectriques (thermocouples): ils sont basés sur l’existence d’une
force électromotrice lorsque deux soudures entre deux métaux différents sont à des tempé-
ratures différentes. Il s’agit du phénomène de Seebeck résultant de l’effet Peltier et l’effet
Thomson.
−les sondes à résistances de platine: il s’agit de résistances thermoélectriques compo-
sées d’un métal (en général du platine qui est inoxydable et de point de fusion de 1769řC)
dont la résistivité ainsi que les propriétés géométriques augmentent avec la température.
Les différentes caractéristiques de ces capteurs sont données dans le tableau ci-après:
Temps de réponse Sensibilité relative Précision Domaine d’utilisation
Thermistance CTN 1sà1mn 10−2C−11řCde −100 à 400řC
Sonde à résistance de Pt 5à 50s4.10−3C−10,1řCde −200 à 1000řC
Thermocouple 0,5à1mn 0.510−3C−11řCde −270 à 2720řC
Tableau 1. Ordre de grandeur des caractéristiques des capteurs électriques de température.
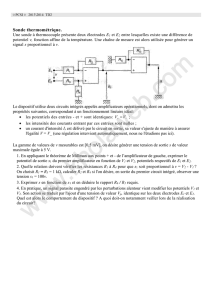
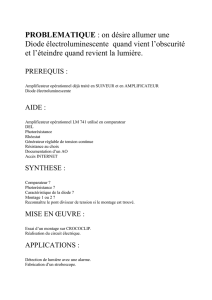
Pour réaliser notre thermomètre, nous avons utilisé une sonde à résistance de platine HEL-
700 dont la la variation de résistance avec la température est donnée par:
R(T) = R0(1 + A.T +B.T 2−100.C.T 3+C.T 4),(1)
avec R0=1000Ωla résistance de la sonde à 0řC, A= 3,81.10−3řC−1,B=−6,02.10−7řC−2et
C=−6,04.10−12 řC−4si T < 0et nul sinon.
Figure 1. Évolution de la résistance de la sonde en fonction de la température.
La température: une grandeur physique à mesurer 3
Olivier Martin & Pierre Gérold École normale supérieure de Cachan

Un bon capteur est caractérisé par un certain nombre de qualités:
−Ne pas modifier la grandeur à mesurer (faible capacité thermique)
−Avoir un faible temps de réponse
−être fidèle, sensible et précis
Nous verrons par la suite comment nous avons mesuré le temps de réponse de la sonde avec
un séche-cheveux.
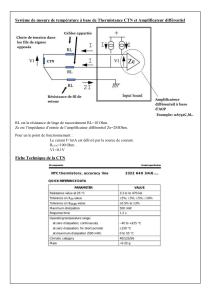
Les caractéristiques de notre sonde à résistance de platine sont donnés ci-après.
Figure 2. Caractéristiques de la sonde utilisée.
La première idée qui peut venir à l’esprit pour avoir une image de la température est d’ali-
menter la sonde avec une source de tension continue et de mesurer la résistance directement.
Néanmoins, pour obtenir un courant mesurable et différentiable du bruit, il faut une tension
d’alimentation suffisante. Or, on risque de provoquer un phénomène d’auto-échauffement de la
sonde ce qui faussera notre mesure. Le constructeur donne un coefficient d’auto-échauffement
(self heating) ici de 0.3mW /řC.
On peut donc réaliser un pont diviseur de tension et mesurer la tension aux bornes de la
sonde qui est une image de la température par le bias de la résistance. Néanmoins, nous allons
montrer que ce conditionnement n’est pas adapté et qu’il va falloir se tourner vers un montage
basé sur un pont de Wheatstone.
2 Le conditionnement de la mesure
2.1 Immunité aux perturbations:le pont de Wheatstone
2.1.1 Qui était Charles Wheatstone ?
Charles Wheatstone (1802-1875) était un physicien et inventeur britannique à qui on doit
nottament le concertina anglais, le premier microphone, le premier télégraphe électrique de Lon-
dres ainsi que le fameux pont de Wheaston. Il est aussi le père de la stéréoscopie qui est
l’ensemble des techniques mises en oeuvre pour reproduire une perception du relief à partir de
deux images planes.
4Section 2
Olivier Martin & Pierre Gérold École normale supérieure de Cachan

Figure 3. Portrait de Charles Wheatstone.
2.1.2 Un principe simple et efficace
Nous avons vu que notre sonde à résistance de platine se comporte comme une résistance
dépendant de la température par une loi donnée par l’équation (1). Pour éviter l’auto-échauffe-
ment, on peut utiliser un pont diviseur de tension classique alimenté par une tension continue E
dont la valeur sera discutée dans la dernière partie. Si on place en série de la sonde une résis-
tance R, la tension fournie par cet étage sera:
v=ERT
R+RT
.(2)
Il faut déjà d’embler remarquer que cette structure n’est pas linéaire et ce sera aussi le cas
par la suite. On voit donc qu’on devra introduire une erreur d’approximation linéaire qui inter-
viendra dans notre précision.
Ce montage présente un inconvénient majeur: on ne dispose d’aucune référence simple. En
effet, il serait pratique d’avoir une tension de sortie nulle à 0řC par exemple, alors qu’ici si on a
bien R=R0= 1kΩon aura une tension E
2en sortie. Pour réaliser un étalonnage il faut donc con-
naître Eavec une précision suffisante.
De plus, la moindre perturbation sur RT(torsion mécanique par exemple) ne sera pas com-
pensée mais interprétée comme une évolution de la température. Il faut alors imaginer une stru-
cture symétrique capable d’assurer à la fois une référence précise et stable, ainsi qu’une compen-
sation à la fois des erreurs systématiques ainsi que des perturbations. Il s’agit là du principe des
mesures différentielles.
Prenons cette fois-ci deux ponts diviseur symétriques. Si on mesure la différence de tension
entre les deux points milieu de ces ponts, on sera capable d’améliorer la sensibilité aux varia-
tions de RT, et de s’affranchir des perturbations affectant les deux ponts: il s’agit du pont de
Wheatstone.
Figure 4. Pont de Wheatstone en quart de pont.
C’est structure se retrouve énormément dans le conditionnement des signaux provenant de
capteurs, en particuliers pour les jauges de contraintes dans le cadre de mesure de déformation
ou de pression. On réalise une mesure différentielle:
v=E(1
2−RT
R+RT
) = E
2(R−RT
R+RT
).(3)
Le conditionnement de la mesure 5
Olivier Martin & Pierre Gérold École normale supérieure de Cachan
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%