1 INTRODUCTION 2 L`ALGORITHME GSW RLS




0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
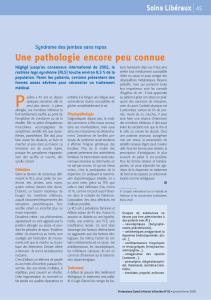
Desajustement du au bruit
Desajustement du a la variation du canal
GSW RLS
WRLS
SWC RLS
0.92 0.93 0.94 0.95 0.96 0.97 0.98 0.99 1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
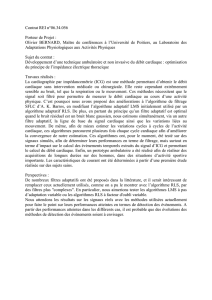
Facteur d’oubli
EQM totale
0.95
0.97
0.99
0.995
50 100 150 200 250 300
0.32
0.33
0.34
0.35
0.36
0.37
0.38
0.39
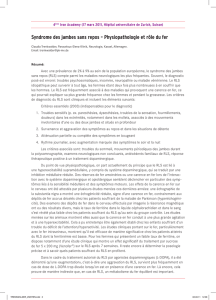
L
EQM totale
0.986
0.987
0.988
0.989
1
/
4
100%