télécharger le PDF

X Physique et Sciences de l’ingénieur MP 2010 — Énoncé 1/15
ÉCOLEPOLYTECHNIQUEFILIÈREMP
OptionPhysique etSciencesdel’Ingénieur
CONCOURSD’ADMISSION2010
COMPOSITIONDEPHYSIQUE ETSCIENCESDEL’INGÉNIEUR
(Durée :4heures)
L’utilisation descalculatricesestautorisée pourcette épreuve.
⋆ ⋆ ⋆
Lecteursoptiquesnumériques
LelecteuroptiquededisquesCDouDVD(figure1)estun objet trèsrépandu dansl’équi-
pementélectronique.C’estun objet technologiquementcomplexe etdontlefonctionnementfait
intervenirdesaspectslogicielsetmatérielsélaborés:optiqued’éclairementdu disque,photodé-
tection delalumière enretour,asservissementsdefocalisation,demaintien defaisceausurla
piste etdemaintien delavitessededéfilement,codage etcorrection d’erreurs.Cette épreuve
aborde,demanière élémentaire,quelquesaspectsdesdispositifsoptiquesdelecture etdesdis-
positifsmécaniquesde contrôlededéplacements.
Figure1:DisquescompactsetDVD.
Ledisque compactseprésentesouslaformed’un disquedediamètre120 mm etd’épaisseur
1,2mm,surlequelestgravée l’information binaire,convenablementcodée.Cettegravure est
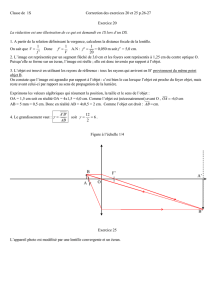
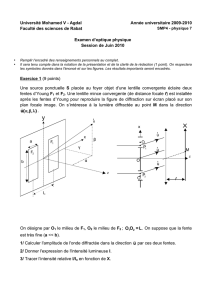
constituée demicrocuvettes,delargeurconstante etdelongueurvariable.Laprofondeurde ces
cuvettesestdel’ordredequelquesdizainesdenanomètres(figure2).
Lorsdelarotation du disque, les structuresporteusesd’information binairedéfilentdansle
planfocald’un dispositifoptique.Ces structuresdiffractentet réfléchissentlefaisceau delecture.
L’analysedesfaisceauxenretourpermetainsideremonterauxinformationsenregistrées.
Téléchargé gratuitement sur www.Doc-Solus.fr .

X Physique et Sciences de l’ingénieur MP 2010 — Énoncé 2/15
Figure2:(a)Coupedesdifférentescouchesd’undisque compact.(b)Vueaumicroscopeà
force atomiquedescuvettespermettantle codage numériquedesinformations.
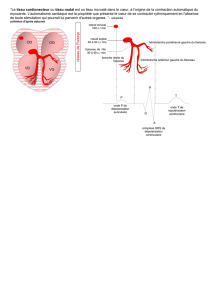
Lapiste estcodée lelongd’unespirale(lerayonestunefonctionaffinedel’anglepolaire)
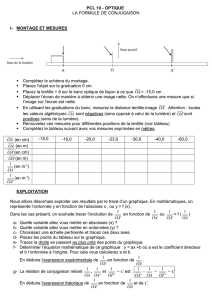
dontlepasradial, notép,estde1,6µmpourlesCD,0,74 µmpourlesDVDet0,3µmpourle
Blu-Ray(Figure3).Cetteréduction depasdelaspirale estdueàladiminution deslongueurs
d’onderespectivesdelecture:780 nmpourleCD,650 nmpourleDVDet405 nmpour
leBlu-Ray.
Figure3:QuelquescaractéristiquesdesCD,DVDetBlu-ray.Lescerclesindiquentlataille
approximative duspotlaser.LesymboleNA estdéfiniquestion8dela partieII.
PartieI.Aspectsdelamécaniqued’unlecteurdeCD
Lalecturedespistes sefaitdu rayonintérieurr0verslerayonextérieurr1.Lavitessede
défilementdelapistedevantlespot,notée V,estconstante(lavitessederotation desCDaudio
par rapport au bâtin’estdoncpasconstante).
I.1.Caractéristiquescinématiquesdesélémentsdu lecteur
1.ExprimerlalongueurLdelaspirale enfonction desrayonsextrêmesetdu pasradialp.
Fairel’application numériquepourp=1,6µm,r0=25 mm etr1=58 mm.
Téléchargé gratuitement sur www.Doc-Solus.fr .

X Physique et Sciences de l’ingénieur MP 2010 — Énoncé 3/15
2.Quelle estalorsladurée maximaleTdelectureaudio?Fairel’application numériquepour
V=1,2m·s−1.
3.Commentévoluelavitessederotationω(r)du disquepar rapport au bâti?Tracerl’allure
de cette évolutionenfonction delapositionrdu spotetpréciserlesvaleursω0etω1qui
correspondentauxrayonsr0etr1.Onexprimeracesvitessesenradian parsecondepuisentour
parminute.
4.Commentévoluelavitesseradiale˙u(r)du spot?Préciserlesvaleurs˙u0et˙u1quicorres-
pondentauxrayonsr0etr1.Onexprimeracesvitessesenmicromètreparseconde.
I.2.Unesolutiontechnologiquepourledéplacementdu spotlaser
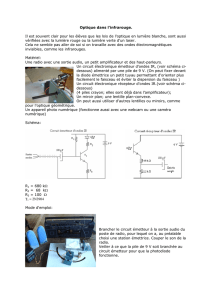
Ledéplacement radialdu spotest réalisédedifférentesmanières suivantlesmodèlesde
lecteur.Généralement, lalentillefocalisatrice etsonsupport sontinstallés surun chariotquise
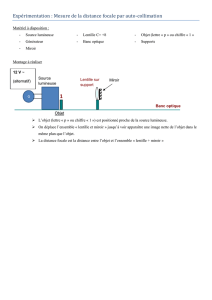
translateradialementpar rapport aucarterdu lecteur (figure4)surledomaine[r0,r1].
Figure4:Le chariotsupportdelentille estguidéparunetige cylindriquelatérale(côtédroitdu
chariotsurla photo)etunappuilatéral(côtéopposéduchariot).Lemouvementestdoncradial.
Lafigure5décritschématiquementleguidage entranslation du chariotCh par rapport au
bâtiBa.Pourchacun des3pointsA,B,Cle comportementcinématiquedelaliaisonestdéfini
parlestorseursdesvitessesrelativesrespectifs:
{VLiaisonA(Ch/Ba)}=
A®~
Ω=˙α~x+˙
β~y+˙γ~z
−→
VA=˙u~x´;{VLiaisonB(Ch/Ba)}=
B®~
Ω=˙α~x+˙
β~y+˙γ~z
−→
VB=˙u~x´
{VLiaisonC(Ch/Ba)}=
C®~
Ω=˙α~x+˙
β~y+˙γ~z
−→
VC=˙u~x+˙v~y´.
AB
C
(Ch)
(Ba)
x
yb
a
(Ba)
O
Figure5:Détailduguidage entranslationduchariotsupportdelentille.
Téléchargé gratuitement sur www.Doc-Solus.fr .

X Physique et Sciences de l’ingénieur MP 2010 — Énoncé 4/15
5.Donnerlenomde chacunedestroisliaisonsetfaireun graphedeliaisonsmontrant
commentle chariot (Ch)est reliéau bâtidu lecteur (Ba).
6.Montrerquel’ensemble constituédes3liaisonsenA,BetCestéquivalentàuneliaison
donton préciseralenometletorseurcinématique enA.
7.Préciserledegréd’hyperstatismehde cetteréalisation.Commentez lerésultat.
I.3.Dynamiquedu déplacementradialdu chariot
Ledéplacementestcommandéparun moteur rotatifdontlavitesse est réduitefortementde
tellesortequelavitesseradialedu spotsoitcomprisedanslaplagedéterminée àlaquestion4.
Lemoteur rotatifentraînelavisd’un engrenageroue etvis sansfinàunevitessederotation˙
θ1.
On noteImlemomentd’inertiedu moteurautourdesonaxederotationetCmle coupleque
lestatorexerce surlerotorde ce moteur.On noteKtlarigidité entorsion del’axequireliele
moteurautrain d’engrenages.
Lerestedelachaîne cinématique estsupposéindéformablejusqu’auchariotsupport delentille
(figure6)demasseM.Un pignonestinstallésurlemêmeaxequelarouedel’engrenageroue et
vis sansfin.Iltourneavec celle-ciàunevitessederotation˙
θ2.Cepignonentraîne entranslation
une crémaillèresolidairedu chariotsurlequelestinstallélesupport delentille.Lavitessede
translation delacrémaillère estdonc égaleà˙u.Laforce depoussée quelacrémaillère exerce sur
le chariotsupport delentille estnotée Fp.Le couplequelesystème élastiquedetorsionexerce
surl’engrenageroue etvis sansfinestnotéC1.
Ledéplacementdu chariotalieu dansun plan horizontalperpendiculaireàl’axedela
pesanteur.L’anglederotationθ1etlatranslationusontliésparlarelationu=Keθ1où
Ke=4×10−5m.OnadmettralarelationC1=KeFp.
8.Donnerl’expression deC1enfonction deKtetdesvariablespertinentes.
9.Fairelebilan desactionsmécaniquesquis’exercentsurlerotoretappliquerlethéorème
du momentdynamiqueautourdel’axederotation.En déduireunerelationentreCm,θm,θ1et
lesparamètrespertinents.
Figure6:Chaînedetransmissiondumoteurauchariotsupportdelentille.
Téléchargé gratuitement sur www.Doc-Solus.fr .

X Physique et Sciences de l’ingénieur MP 2010 — Énoncé 5/15
Figure7:Décompositiondesélémentsdelachaînedetransmission.
10.Fairelebilan desactionsmécaniquesquis’exercentsurle chariotsupport delentille et
appliquerlethéorèmedelarésultantedynamique en projectionsurl’axedelatranslation du
chariot.En déduireunerelationentreFp,uetlesparamètrespertinents.
11.ÉliminerFp,C1etθ1desrelationsobtenuesaux questions8,9,10 ainsiquedesdeux
relationsconstitutivesu=Keθ1etC1=KeFp.En déduirelesystèmedifférentielcouplérelatif
aux variablesθmetu.
12.Écrirelesystèmeprécédentsouslaformematricielle:
[M]¨
X+[K]X=Favec X=Çθm(t)
u(t)å
où[M]et[K]sontdesmatrices2×2quel’on préciserasousformelittéralepuis sousforme
numériqueavec lesvaleurs suivantes:
M=0,5×10−3kg
Kt=0,785 N·m·rd−1
Im=0,125 ×10−9kg·m2.
13.Oncherchelaréponsedu systèmelibre(i.e.lorsqueF=0)souslaforme:
X=Aexp(iωt).Montrerquelesvaleurspossiblesdeωsontlesracinesd’un polynôme
quel’on détermineranumériquement.Montrerquelesystème estoscillantetpréciserlesdeux
fréquencespropresf1etf2.
I.4.Systèmedesuividelapistespirale
Lesbitsd’informationétantstockés souslaformede cuvettes submicroniques, lelecteur
doitassurerlepositionnementdelatêtedelecturepar rapport au disqueavec uneprécision de
quelquescentaines,voirequelquesdizainesdenanomètres.Dansun teldispositif,onretrouve
deuxtypesdedéfautsquedoiventcorrigerleslecteursdeCD.
D’unepart,pourdesraisonsoptiquesexplicitéesen partieII, il fautcontrôlerladistance
entreledisque etl’objectifavec uneprécisioninférieureaumicromètre.Lesdéfautsdel’axedu
Téléchargé gratuitement sur www.Doc-Solus.fr .
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%