L`apprentissage du vélo n`est pas un jeu d`enfant !

TIPE 2005 Fabien Le Bouter—Manuel Philippe Lycée St Joseph LORIENT
Suivi & Mise en forme : Ch. ROUGNANT
L'adulte qui pratique avec aisance le vélo a certainement oublié les heures d'apprentissage, les
chutes, les premiers mètres considérés comme une victoire.
Pourquoi est-ce si difficile pour l'enfant qui apprend et si facile pour celui qui sait faire du vélo ?
Comment peut-on maintenir un équilibre lorsqu'il est en mouvement alors qu'à l'arrêt il tombe ?
Cette dualité équilibre-mouvement, instabilité-arrêt ne peut qu'être due à un effet dynamique.
L'effet gyroscopique est l'effet dynamique quasi magique qui empêche la toupie de tomber, qui
permet à un cerceau ou une pièce de monnaie de se déplacer en ligne droite. Il est bien connu
des motards, ils l'utilisent pour pencher leur lourde moto, lors d'un virage, en tournant le guidon
dans le sens opposé au virage !
Serait-ce le couple gyroscopique qui assurerait l'équilibre du vélo en mouvement ?
C'est ce que nous avons voulu vérifier en
instrumentant un vélo de façon à mesu-
rer ses mouvements lors d'un déplace-
ment en ligne droite
L'apprentissage du vélo n'est pas un jeu d'enfant !

TIPE 2005 Fabien Le Bouter—Manuel Philippe Lycée St Joseph LORIENT
Suivi & Mise en forme : Ch. ROUGNANT
Le dispositif de mesure
La mesure ne pouvant se faire en laboratoire, il faut disposer d'un ensemble de mesure porta-
ble. L'interface "LabPro" permet l'acquisition de données analogiques (4 voies) et numériques (4
voies)
Le stockage des données peut se faire par ordinateur mais également par les calculatrices TI.
Nous utiliserons une calculatrice TI89 lors de l'essai et le traitement des données se fera sur or-
dinateur
Que faut-il mesurer ?
Le défaut
:
le vélo pivote autour d'un axe passant par les points de contacts entre le sol et
les roues avant et arrière. Il faut donc mesurer l'inclinaison θ
θθ
θv (voir ci-
dessous)
La correction
:
le rétablissement est certainement dû à un effet dynamique, il faut évaluer la
masse, l'inertie de l'ensemble, la position du Centre de masse et mesurer son
accélération.
Il faut également mesurer la vitesse de rotation de la roue (qui nous donnera
également la vitesse de déplacement du vélo) et la vitesse de rotation du
guidon car nous voulons vérifier l'influence du couple gyroscopique.
Les capteurs
La mesure des vitesses de rotation (roue et guidon) se fera par 2 codeurs "Bournus" 0-5 V
mesurant un déplacement angulaire et donnant accès aux vitesses et accélérations angulaires.
La mesure de l'accélération du Cdm se fera par un accéléromètre placé en G (Cdm de l'en-
semble : Vélo + Cycliste).
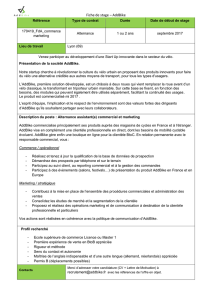
La mesure de l'inclinaison se fera également par un accéléromètre car ces capteurs mesu-
rent l'accélération et l'inclinaison. Il se pose, alors un problème :
Comment différencier la mesure de l'accélé-
ration et celle de l'inclinaison ?
La solution est de placer 2 accéléromètres dont
les distances à l'axe sont connues (R et r)
Un traitement analytique permet ensuite de cal-
culer les 2 grandeurs, l'inclinaison des 2 capteurs
étant toujours la même :
Soit V1 et V2 les mesures issues des accéléromètres
θ
θθ
θv
----a
1
----a
2
R
r
θ
θ
θ
θg
θ
θθ
θr
axe de
rotation
V k k
V k k V V k
R r
k k
v
v
avec v et v
et
v
v
pour en
V V
k R r
V V
R r r
V k
1 1 2 1
2 1 2 2 1 2 2 1 2
1 2
1 1 90 2 0,25
1 2
2
11 2 1
=
+
= +
O
Q
P− =
= =
L
N
M
MO
Q
P
P
−
= =
°
=
=
−−
+−
−
. .
. . .
&& .&& .
,72/ ;
( )
&&
.
.
.
θ
θ
θ θ
θ
θ
θ
a
aa a
a a
a f
d i
c h
d i
c h

TIPE 2005 Fabien Le Bouter—Manuel Philippe Lycée St Joseph LORIENT
Suivi & Mise en forme : Ch. ROUGNANT
θv
_
ω
g
_
ω
v
1
èr
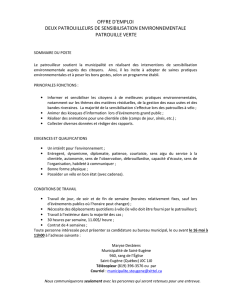
constat
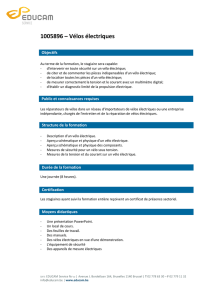
:
le vélo ne peut suivre une trajectoire parfaitement rectiligne
Si l'on superpose l'évolution de l'inclinaison du vélo
(/ plan ⊥ au sol)
θ
θθ
θ
v à la vitesse angulaire du guidon
ω
ωω
ω
g, on voit de façon assez nette l'influence de
cette rotation sur l'équilibre.
Est-ce le couple gyroscopique
qui rétablit l'équilibre ?
Les conditions d'essai
La mesure a été effectuée sur une distance de 25m, départ arrêté avec une phase d'accélération sur
une dizaine de m et une phase quasi constante sur quelques mètres
Les consignes, lors de l'essai, étaient de suivre une ligne droite et de donner par 2 fois deux "coups
de guidon" (on les perçoit ci-dessous aux alentours de 11 et 18m)
2
ème
constat
:
la rotation du guidon est directement
liée à l'équilibre
(ou au déséquilibre ?)

TIPE 2005 Fabien Le Bouter—Manuel Philippe Lycée St Joseph LORIENT
Suivi & Mise en forme : Ch. ROUGNANT
Le Couple Gyroscopique
Le Moment perturbateur"
____C
gyro =
J.____Ω
Ω Ω
Ω
r
∧
∧∧
∧
____ω
ωω
ω
g
________Ω
Ω Ω
Ω
r
________ω
ωω
ω
g
____C
gyro
M1
= +d m g d m
V V
.sin . . ². .&&
θ θ
Les actions mécaniques qui perturbent l'équilibre du vélo sont :
Le poids de l'ensemble
La résultante dynamique (m.
at
) due à l'inclinaison du vélo
(dont le sens dépend du mouvement)
Ces actions déterminent un moment d'axe passant par les points de
contact des 2 roues :
y
0
y
1
z
0
θ
θθ
θ
v
_
M 1
__
Fi1
m.g
d
Le couple gyroscopique est un effet dynamique qui apparaît lorsqu'il y a 2 rotations
L'expression ci-dessus est une approximation satisfaisante si l'on a une rotation lente et une
rapide et que les 2 rotations sont d'axes perpendiculaires.
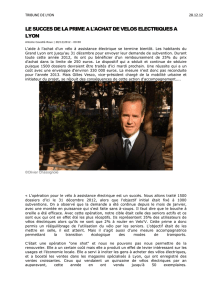
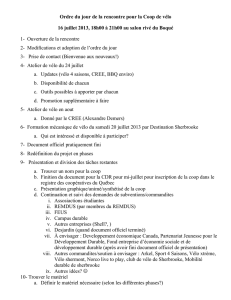
En comparant les 2 courbes on
peut constater que le couple
gyroscopique semble bien s'op-
poser au moment perturbateur,
mais il est, sur le graphique
multiplié par 100 !
Le couple gyroscopique n'a donc qu'une très faible influence
sur l'équilibre du vélo

TIPE 2005 Fabien Le Bouter—Manuel Philippe Lycée St Joseph LORIENT
Suivi & Mise en forme : Ch. ROUGNANT
y
yy
y
0
y
yy
y
1
z
zz
z
0
θ
θθ
θ
v
____M
2
____M
1
________
a
n
________F
i2
________F
i2
θ
θθ
θ
g
R = a / tan
θ
θ
θ
θ
g
d
θ
θθ
θ
g
x
xx
x
0
L'équilibre du Vélo
M2
2
=d m ag
v v
.cos . .&.tan
θ θ θ
Pour assurer l'équilibre du vélo il faut un mo-
ment compensateur directement opposé au cou-
ple perturbateur :
La rotation du guidon amène le vélo en situation de
virage autour d'un axe perpendiculaire au sol. Il y au-
ra donc une accélération normale (= v²/R) qui engen-
dre une seconde force d'inertie.:
Cette force d'inertie donnera lieu à un moment
autour d'un axe passant par les points de contact
pneus/sol et opposé au couple perturbateur
M
1
= +d m g d m
V V
.sin . . ². .&&
θ θ
a
 6
7
8
9
6
7
8
9
1
/
9
100%