Sujets Stéphane Mancini

CSUG:SatelliteATISE
●NanoSatelliteétudiantpourmesurede
spectred'auroreboréaleetventsolaire
●Acquisition et pré-traitement des données
sur plate-forme Zynq
CollaborationCSUG/Pyxalis/RésolutionSpectra
2 coeur ARM Cortex A9
+
FPGA

ATISE
●Contexte
–Le projet ATISE a passé la phase 0 et le CNES a validé l'étude de faisabilité
–PhaseAduprojetdesatellite=>maquetteausolfonctionnelle
–Travailler dans un cadre « spatial »,dansleprocessus CNES, RNC version étudiante
–4 Octobre (aujourd'hui!!) : réunionétudiantsCSUG
–Mars 2017 :pointclé; Juillet 2017 revuedephaseAavecCNES
–PoursuiteenstagePFE
●Contraintes
–Environnementspatial=rayonnement=>durcissement
–Nano-satellite=>basse consommation
Plate-formedecalculFPGAZynqHW(FPGA)+SW(ARM) 100Gops/Watt⇒
●Objectifs
–Interfaceaucapteur«imageur»dePyxalis
–Algorithmesdepré-traitementetcalculscientifiqueàbord
●Réalisations
–Etuded'architectureetdeperformance
–Acquisitiondesdonnéesducapteurettestsenoptiqueclassique
–Pré-traitementsetcalculscientifiqueenHWetSW
–DéveloppementsHWensynthèsedehautniveau(HLS)

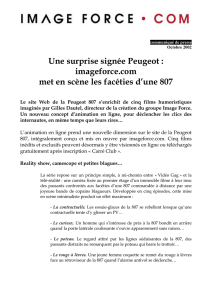
JPEG2000&HLS
SynthèseHLSd'uneunitédecompression
d'imageetvidéo.
Enéditionvidéo,ceformatestpréféréàMPEG2/4carilest
tolérantauxerreursetpermetl'accèsimmédiatàtouteimage
duflux.
http://research.microsoft.com/en-us/um/people/jinl/paper_2002/msri_jpeg.htm

JPEG2000&HLS
●Objectif
–Encoderdesimagesauplusprocheducapteurpourtransmission
–HLS=duHWàpartirduSW
●Spécifications
–NormeJPEG2000
●Réalisations
–Etuded'architecture
–C++ pour la HLSdepartiesdel'algorithme
–ValidationHLSparsimulation
–Mesuredeperformance :temps/surface
–IPsurplate-forme HW/SW Zynq
–Tests sur carteZybo

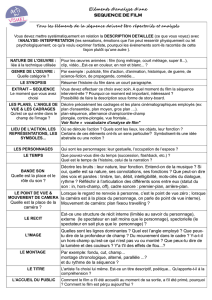
CaméraPan-optique
●Contexte
–Unecamérapan-optiqueoupanoramique
permetdeproduireunevueà360°àpartirde
prisesdevuemultiples
–Utiliserdesmodulescaméradetéléphone
mobileetfaireleraccordement(stitching)en
tempsréelsurFPGA
●Pointdedépart
–Algorithmedestitching
–Maquetteexistante
●Objectifs
–Calibrationdynamiquedelagéométrieet
luminosité
–Etuded'architecture
Caméra
RaspberryPi
Stitchingdes
4FOV
Différencesdegain
 6
6
1
/
6
100%