Le train MAGLEV - Antoine SOUBIGOU

SOUBIGOU Antoine
LE GUENNOU Pascal GE1
Année 2001 Professeur : Mr Sturtzer

I. Introduction
Aimants de supraconduction, sûreté, fiabilité
II. Intérêt
Grandes vitesses, usure, coût.
III. Principe
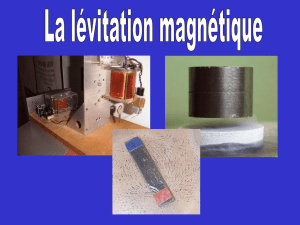
III.1. Principe de lévitation magnétique
III.2. Principe de propulsion
III.3. Principe de guidage latéral
IV. En détails
IV.1. La voiture
IV.2. L’aimant de supraconduction
IV.3. Voie de guidage
IV.3.1. Les faisceaux
IV.3.2. L’installation des panneaux
V. Conclusion
Futures utilisations, avantages et inconvénients.
2

I Introduction
Un système élevé superbe de transport à grande vitesse doté d’un système d'entraînement non
adhésif qui est indépendant des forces de friction entre roue et rail fut un rêve de longue date pour les
ingénieurs ferroviaires. Le train Maglev (Magnetique levitation train), combinant les aimants de
supraconduction et la technologie linéaire de moteur, assure un fonctionnement parfait à vitesse
élevée, une grande sûreté, de la fiabilité, de basses influences sur l'environnement ainsi qu’un entretien
considérablement réduit.
Les objectifs de développement sont les suivant : freins aérodynamiques, qui utilisent la
drague aérodynamique des panneaux sur le toit de voiture, et freins à disque pour le fonctionnement à
vitesse élevée; les enroulements sur la voie utiles pour la lévitation de paroi latérale; un circuit
d'alimentation de haute puissance pour des inverseurs de la modulation de largeur d'impulsion (PWM)
à l'aide de thyristors d'arrêt de porte (GTO); le changement de voie pour le dépassement à vitesse
réduite ou élevée.
Ligne d’essai de Yamanashi
Un développement limite s'est produit pour Maglev en 1990 lorsqu’il a gagné le statut d'un
projet national. Le ministre du transport a autorisé la construction de le ligne d’essai de Yamanashi,
visant la confirmation finale de Maglev pour l'usage pratique. Elle a été ouverte le 3 avril 1997 et est
maintenant utilisée pour réaliser les essais courants. La même année, le véhicule MLX01 de Maglev
(en image plus loin ) comprenant trois voitures, a réalisé des records de vitesses mondiales atteignant
un maximum de 531 km/h dans un véhicule équipé le 12 décembre, et une vitesse maximum de 550
km/h dans un véhicule non piloté le 24 décembre. Le 18 Mars 1999, MLX01, avec cette fois ci cinq
voitures a atteint une vitesse maximum de 548 km/h. Le 14 Avril 1999, cette composition de cinq
voitures a surpassé l'enregistrement de vitesse du train de trois voitures, atteignant une vitesse
maximum de 552 km/h dans un passage équipé de véhicule.
3

II Intérêt
Ces trains à lévitation présentent plusieurs avantages : outre le fait qu'ils circulent à de très
hautes vitesses (ce qui raccourcit la durée des trajets), ils n'usent pas les voies (car il n'y a pas de
contact direct), et le problème du captage du courant par pantographe ne se pose plus. Les contraintes
des trains sur rails (contact pantographe-caténaire, adhérence, freinage, signalisation) n'autorisent pas
aujourd'hui des vitesses commerciales au-delà de 350 km/h. Les trains à lévitation semblent donc
prometteurs, mais les problèmes liés à leur mise au point (entre autres le problème du captage de
l'énergie - il n'y a plus de contact !) et les infrastructures nécessaires font qu'aujourd'hui, les trains
conventionnels ont encore de beaux jours de recherche devant eux.
Mais de plus en plus de région s’intéresse à ce système, par exemple un projet au alentour
d’atlanta est en discussion, mais encore, l’aérospatial serait intéressée par ce système pour propulser
les navettes du sol, l’avantage principal étant le carburant en moins.
III Principe
Cette dernière est basée sur la répulsion entre les éléments embarquées sur le train et des
plaques conductrices (ou des bobines court-circuitées) situées sur la voie. L'avantage des bobines est
de réduire la puissance dissipée. L'entrefer (distance sol-train) peut être de 10 cm si les aimants du
train sont suffisamment puissants. Il faut faire appel à la supraconductivité. Par interaction entre un
inducteur embarqué et des bobines sur la voie, le train se meut pour le plus grand bonheur des
ruminants.
Le Maglev est donc un système dans lequel le véhicule fonctionne en lévitation sur la voie de
guidage (correspondant aux voies ferroviaires des chemins de fer conventionnels) en utilisant les
forces électromagnétiques entre les aimants super conducteur à bord du véhicule et des enroulements
sur le rail. Ce qui suit est une explication générale du principe de Maglev. On y décrit trois principes
fondamentaux qui assure la bonne lévitation du train.
III.1. Principe de lévitation magnétique
Les " 8 " sont composés d’enroulements de
lévitation installés sur les parois latérales de la voie de
guidage. Quand les aimants de supraconduction, à bord
du véhicule, passent à une grande vitesse à quelques
centimètres au-dessous du centre de ces enroulements,
un courant électrique est induit dans les enroulements,
qui agissent alors en tant qu'électro-aimants
temporairement. En conséquence, il y a des forces qui
poussent l'aimant super conducteur vers le haut et
d’autres qui les tirent vers le haut simultanément,
faisant léviter de ce fait le Maglev.
4
III.2. Principe de propulsion Une force répulsive et une force attrayante induite
entre les aimants sont employées pour propulser le
véhicule (aimant de supraconduction). Les enroulements
de propulsion situés sur les parois latérales des deux côtés
de la voie de guidage sont activés par un courant alternatif
triphasé d'une sous-station, créant un champ magnétique
de décalage sur la voie de guidage. Les aimants de
supraconduction à bord sont attirés et poussés par la zone
de décalage, propulsant alors le véhicule Maglev.

III.3. Principe de guidage latéral
Les enroulements de lévitation se faisant face
sont reliés sous la voie de guidage, constituant alors
une boucle. Quand le véhicule, contenant l’aimant,
se déplace transversalement, un courant électrique
est induit dans la boucle, ayant pour résultat une
force répulsive agissant sur les enroulements de
lévitation les plus proches du wagon et une force
attractive agissant sur les enroulements de lévitation
les plus loin. Ainsi, une voiture courante est
toujours située bien au centre de la voie de guidage.
IV En détail
Nous allons maintenant voir plus en détail le véhicule de Maglev, ses caractéristiques
générales (portes, intérieur, freins aérodynamiques, arrangement) mais aussi certains schéma vous
nous permettre de mieux visualiser la technologie de guidage et de propulsion du train (chariots,
aimants…).
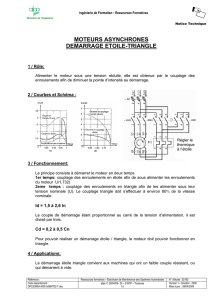
IV.1. la voiture
Avant du MLX01 en aero-wedge Arrière du MLX01 en double cusp
MLX01 (X signifie Expérimental) est le premier train (composé de 3 voitures) à rouler sur la
ligne d’essai de Yamanashi. Les voitures principales sont conçues dans deux modèles: le double cusp
et l’aero-wedge, pour réduire au minimum la résistance aérodynamique lors des grandes vitesses. Et en
prévision d'essai habités, les deux voitures principales sont équipées de sièges.
MLX01 est complété de freins de sauvegarde à bord, à savoir des freins aérodynamiques et des freins
à disque, bien prouvés sur les plus anciennes versions.
5
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%