Algorithmes génétiques

Université Paul Sabatier - ENSEEIHT
Option Méthodes d’Optimisation
Rapport de projet
Algorithmes génétiques
Nadia Selmani

Table des matières
1 Introduction 3
2 Principe 4
3 Mise en œuvre 6
3.1 Codagedesdonnées ..................................... 6
3.1.1 Codagebinaire .................................... 6
3.1.2 Codage à caractères multiples . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.2 Évaluation ........................................... 7
3.3 Sélection ............................................ 7
3.3.1 Rouedelafortune .................................. 7
3.3.2 N/2élitisme...................................... 7
3.4 Sélectionpartournoi ..................................... 8
3.5 Croisement........................................... 8
3.6 Mutation............................................ 9
3.7 Critèred’arrêt ......................................... 10
4 Résultats - Étude de la convergence 11
4.1 Résultats ............................................ 11
4.2 Influence de la taille de la population . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.3 Influencedelamutation ................................... 12
5 Conclusion 14
1

“One general law, leading to the advancement of all organic beings, namely, multiply, vary,
let the strongest live and the weakest die.”
Charles Darwin - The Origin of Species[6]
2

1 Introduction
Les algorithmes génétiques sont des algorithmes permettant de résoudre des problèmes d’opti-
misation. Ils sont particulièrement utilisés lorsque l’on souhaite obtenir de bonnes solutions, pas
nécessairement optimales donc, assez vite.
Ils furent développés pour la première fois dans les années 60 au sein de l’Université du Michigan
par J. Holland ([1]) et ses collègues.
Ces algorithmes se basent sur la théorie darwinienne de l’évolution : les organismes vivant
changent constamment, les plus adaptés à leur environnement survivent, les autres disparaissent.
les espèces actuelles peuvent donc être vues comme des "versions optimisées" de leurs ancêtres. Si
ces méthodes ont connu au départ un succès timide, elles ont été popularisées aux États-Unis à la
fin des années 80, et au début des années 90 en Europe au travers des travaux de D. Goldberg([3]) et
de J.-M Alliot ([4]).
Aujourd’hui, les algorithmes génétiques sont utilisés pour résoudre des problèmes d’optimisa-
tion de forme, en aéronautique par exemple.
Ainsi, afin d’optimiser la forme des ailes de ses avions, Airbus donne à un algorithme génétique
une population initiale de formes a priori intéressantes, effectue une simulation dont le critère de
fin est une limite temporelle et optimise par la suite l’un des résultats finaux par d’autres méthodes
plus précises et mathématiquement très bien définies.
Ils sont également utilisés en statistique décisionnelle, au sein d’entreprises cherchant à maximi-
ser leurs résultats tout en minimisant les coûts. Ils ont de plus donné naissance à la programmation
génétique, prélude probable à l’Intelligence Artificielle, puisqu’il s’agit d’apprendre à un programme
à en optimiser d’autres.
Cette méthode a ses avantages et ses inconvénients, qui seront présentés par la suite.
N.B. :
Le présent rapport a pour vocation de présenter le principe et les différentes méthodes
d’implémentation d’un algorithme génétique simple. Les éléments mathématiques ayant trait à la
convergence de la méthode, demandant un certain niveau en théorie des schémas, ne seront pas
explicités. SI toutefois le lecteur souhaite en savoir plus, la page de J.-M. Alliot et ses références
constituent une bonne introduction ([2]).
3

2 Principe
Rappelons tout d’abord brièvement les différentes étapes de l’évolution génétique d’une popu-
lation.
Considérons un ensemble d’individus, la population donc. Initialement, ces individus présentent
certaines caractéristiques, les gènes. L’ensemble des gènes d’un individu est appelé le génotype.
La première étape est la sélection : seuls les individus les mieux adaptés à leur environnement
peuvent se reproduire, et donc transmettre une partie de leurs "meilleurs" gènes à la génération
suivante.
Lorsque deux individus se reproduisent, leurs gènes sont croisés dans les cellules de l’enfant,
c’est-à-dire que certaines allèles de l’individu A se combinent avec d’autres allèles de l’individu B
pour former de nouveaux gènes. On appelle ce phénomène un brassage génétique. Il existe deux
types de brassages : les brassages interchromosomiques et les brassages intrachromosomiques. Ces
deux notions sont développées en annexe.
A ce premier facteur de diversité s’ajoute la possibilité d’une mutation de certains gènes. Géné-
ralement, la probabilité d’une mutation est très faible, mais ce phénomène doit être pris en compte
pour obtenir un algorithme complet.
L’enfant issu des individus A et B a donc un génotype différent de celui de ses parents.
Suite à cette reproduction, on obtient une nouvelle génération d’individus, qui devient la nou-
velle population initiale. Les trois étapes de sélection, croisement et mutation sont à nouveau opérées
pour obtenir une nouvelle génération, et l’on réitère le processus un grand nombre de fois, puisque
la sélection naturelle se fait sur un temps long.
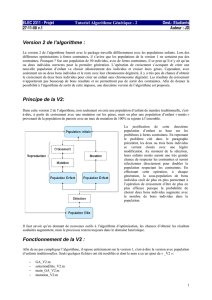
C’est ce principe-même, résumé dans la figure (1) qui est retranscrit dans les algorithmes géné-
tiques, avec de légères variations liées notamment aux contraintes informatiques. En effet, la taille
de la population ne peut être ni croissante pour des raisons de coût en temps, ni décroissante, car
à mesure que le nombre d’individus diminue, des solutions potentiellement optimales peuvent
disparaître.
4
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%