Les automates cellulaires 3.1 Définition Un automate cellulaire

1
Université Du Havre, Master : Mathématiques-Informatique (Matis)
MIS7 : Modèles discrets: évolution, auto-organisation
2010/2011
Nakechbandi M.
moustafa.nakechbandi.univ-lehavre.fr
Chapitre 4 : Les automates cellulaires
3.1 Définition
Un automate cellulaire (AC) est un 4-uplet (d,Q,V,δ) où :
• d est la dimension de l'automate, son réseau est alors , l'espace
discret de dimension d ;
• Q, un ensemble fini, est son alphabet ;
• est son voisinage (un sous-ensemble fini de sommets
réseau) ; V=(v1, v2, … va )=(vi ϵ Zd; 1≤j≤a)
• est sa règle de transition et a = |V|.
On appelle alors configuration l'attribution d'un état à chaque cellule du réseau :
une configuration est une fonction de dans Q.
3.2 Exemples
Exemple 1 : Automate cellulaire simple.
Il s’agit d’un automate A =(Zd=1,Q,V,δ)où :
• Q= {0,1}
• V : Les voisins d’une cellule i sont les cellules : i, i-1 et i+1 Pour simplifier
ce voisinage peut être décrit par le triplet V =(-1,0,1)
• δ est une transition qui est définie par le tableau suivant :
(q1,q2,q3)
voisinage possible de la cellule centrale
111
110
101
100
011
010
001
000
δ(q1,q2,q3)
Valeur suivante de la cellule centrale 0 0 0 1 1 1 1 0
Cela signifie que si par exemple, à un temps t donné, une cellule est à l'état « 1 »,
sa voisine de gauche à l'état « 1 » et sa voisine de droite à l'état « 0 », au temps
t+1 elle sera à l'état « 0 ».

2
Il s’agit d’une grille unidimensionnelle de cellules ne pouvant prendre que deux
états (« 0 » ou « 1 »), avec un voisinage constitué, pour chaque cellule, d'elle-même
et des deux cellules qui lui sont adjacentes.
Chacune des cellules pouvant prendre deux états, il existe 23=8 configurations (ou
motifs) possibles d'un tel voisinage. Pour que l'automate cellulaire fonctionne, il faut
définir quel doit être l'état, à la génération suivante, d'une cellule pour chacun de
ces motifs. Il y a 28=256 façons différentes de s'y prendre, soit donc 256 automates
cellulaires différents de ce type.
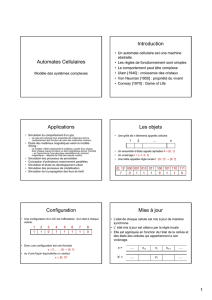
Si l'on part d'une grille initiale où toutes les cellules sont à l'état « 0 » sauf une, on
aboutit à :
où chaque ligne est le résultat de la ligne précédente.
Exercice.
Dans l’automate précédent on considère une fonction d’évolution δ décrite comme
suite : δ (q1 , q2 , q3 ) = q1 + q2 + q3 modulo 2 .
1. Décrire le tableau d’évolution de cet automate cellulaire
(q
1
,q
2
,q
3
)
111
110
101
100
011
010
001
000
δ(q
1
,q
2
,q
3
)
2. Si l'on part d'une grille initiale décrite ci-dessous, on veut demande de décrire 4
itérations d’évolution.
Itération
t=0
0
0
0
0
1
0
1
1
0
0
0
0
t=1
t=2
t=3
t=4
Exemple 2 (Le jeu de la vie)
Le jeu de la vie est un automate cellulaire A =(Z2,V,Q,δ) où
• Q = {0,1} : Si une cellule est dans un etat =1 on dit qu’elle vivante sinon
elle morte.
• V= (v0=(0,0), v1=(-1,-1),… V8=(1,1))
v
1
V
2
V
3
V
4
v
0
V
5
V
6
V
7
V
8
• La transition δ est définie comme suite :
- Si la cellule est vivante et entourée par deux ou trois cellules vivantes, elle reste
en vie à la génération suivante, sinon elle meurt.

3
- Si la cellule est morte et entourée par exactement trois cellules vivantes, elle
naît à la génération suivante.
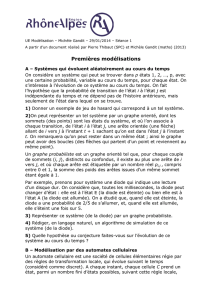
Exemple d’évolution :
0 0 1 0 0 0 0 0 0 0 0 0
0 1 0 0 0 1 0 1 0 1 0 1
0 1 1 1 0 1 1 0 0 1 0 1
0 0 0 0 0 0 1 0 0 1 1 0
0 0 0 0 0 0 0 0
0 1 0 0 0 0 1 0
1 0 0 0 1 1 0 0
1 1 1 0 0 1 1 0
On remarque que après 4 itérations, on retrouve la figure de départ, mais translatée
(-1, -1).
Une configuration est dite stable si après une transition l’automate se trouve dans
les mêmes états. Exemple pour l’automate précédent, la configuration :
0 1 0
1 0 1
0 1 0
est une configuration stable
Exercice 1 : Trouver d’autres configuration stable pour l’automate précédent.
Exercice 2 : Décrire formellement la loi de transition de l’automate précédent

4
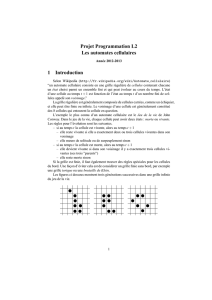
D’autres exemples :
Exercice : soit A =(Zd=1,Q={B, G, N},V =(-1,0,1),δ. La grille ci-dessous
montre l’evolution de cette automate.
(le temps va de bas en haut)
Trouver la loi d’évolution de cet automate.

5
La définition d’un AC et les exemples précédents mettent en évidence trois
propriétés fondamentales des automates cellulaires :
1. Le parallélisme, rappelons qu’un système est dit parallèle si ses constituants
évoluent simultanément et de manière indépendante.
2. La proximité : Le nouvel état d'une cellule ne dépend que de son
état actuel et de l'état du voisinage.
3. L'homogénéité : Les lois sont universelles, c'est-à-dire communes à
l'ensemble de l'espace de l'automate.
3.3 Histoire
• Année 50 et 60, Von Neumann avec ses travaux sur l’auto reproduction invente
le premier automate cellulaire.
• En 1969, G. A. Hedlund publie un article qui pose les bases mathématiques de
l'étude des automates cellulaires comme des systèmes dynamiques particuliers.
• En 1969 Konrad Zuse publia Rechnender Raum « Calculer l'espace » où il
émettait l'hypothèse que les lois physiques étaient discrètes et que l'Univers était
le résultat d'un gigantesque automate cellulaire.
• Dans les années 1970, John Conway invente « le jeu de la vie », c’est un
automate cellulaire à deux dimensions et deux états qui a connu un grand
succès, particulièrement parmi la communauté informatique naissante.
• Années 80 Stephen Wolfram : Étude expérimentale, problématique de la
classification. Wolfram publia une série de publications où il analysait de façon
systématique un type d'automates cellulaires très simples. La complexité de leur
comportement, induit par des règles élémentaires, le poussa à conjecturer que
des mécanismes similaires pourraient expliciter des phénomènes physiques
complexes, idées qu'il développa dans son livre A New Kind of Science paru en
2002.
3.4 Étude de comportement d’un AC
3.4.1/ Complexité du problème
De façon générale, il est extrêmement difficile de déterminer le comportement
global d'un automate cellulaire en examinant sa règle locale de transition. Ceci se
traduit par des résultats d'indécidabilité touchant les propriétés les plus simples.
Dans ce domaine Jarkko Kari (1992) a montré que les problèmes suivants étaient
indécidables :
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%