Un « radar » infaillible ?

Année 2011-2012
Un « radar » infaillible ?
Elèves participants :
MALAGUTTI Jean-Charles CADOT Arnaud BELMAHI Faïçal MICAS Emmanuel LUGARDON Vladimir
Avec : LACLAVERIE Jean-Michel, professeur encadrant
Lycée Bernard Palissy - AGEN
Académie de Bordeaux

2
Concours C.Génial – Les détecteurs de franchissement de feux rouges
Table des matières
Résumé
Introduction
I – Etude des « radars » de feu rouge
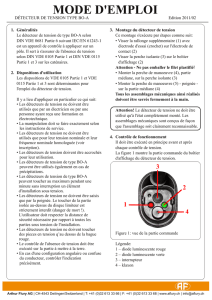
1.1 – Cahier des charges fonctionnel
1.2 – Théorie des détecteurs de métaux
1.3 – Présentation du montage du détecteur
1.4 – Réglages du système
II – Création d’un prototype en laboratoire
2.1 – Montage comparateur
2.2 – Interrupteur commandé
2.3 – Premier prototype : système mécanique asservi
2.4 – Second prototype : prise de décision électronique
2.5 – Contrôle des feux
2.6 – Appareil Photo Numérique (APN)
2.7 – Problèmes récurrents
2.8 – Prototype actuel
III – Brouiller le « radar » : passer outre la détection
3.1 – Expérimentations autour du brouillage
3.2 – Applications
Conclusion
Bibliographie et références internet
Annexes

Concours C.Génial – Les détecteurs de franchissement de feux rouges
3
Résumé : Nous avons réalisé et étudié un modèle de détecteur de franchissement de feu
rouge, généralement appelé de manière impropre un « radar de feu rouge ». Puis, nous
avons cherché à déterminer s’il était possible de tromper notre prototype, en masquant le
passage d’une voiture. Nous y sommes parvenus en utilisant une bobine émettrice portée
par le véhicule à détecter. Nous avons fait appel à nos connaissances en électromagnétisme
sur les bobines du cours de Première et Terminale S, et nous avons travaillé uniquement par
empirisme et tâtonnements pour déterminer l’électronique de notre montage (filtre passe-
bande, détecteur de crête, amplificateur opérationnel comparateur, contrôle électronique).
Partenaire : R. Cadot, ingénieur en systèmes électroniques à la retraite, pour ses
précieux conseils. M Cadot a travaillé sur l’électronique du nez du Concorde, le
métro de Mexico…
Introduction :
Tout a commencé avec la lecture d’un article de Olivier Hertel « Les radars
voient rouge » dans Sciences Avenir. Il nous permit de trouver un sujet intéressant,
en première intention pour les TPE (mais l’idée fut abandonnée par manque de
moyens individuels), puis par la suite pour les Olympiades de Physique (où nous
avions accès au matériel des laboratoires de physique du Lycée). Notre première
surprise fut de découvrir que le terme de « radar » habituellement utilisé n’était pas
du tout adapté. En effet, ces dispositifs s’avèrent être en réalité des détecteurs
électromagnétiques, à l’instar des détecteurs de mines. L’électromagnétisme étant
alors au programme de Première S, nous avons alors envisagé que fabriquer un
détecteur en laboratoire était peut-être à notre portée.
Cependant, nous nous sommes presque immédiatement heurtés à un
problème de taille : nos connaissances en l’électronique. Nous n’avions alors que des
notions des plus basiques enseignées au Lycée et le programme de Terminale S ne
promettaient pas d’être d’un grand secours. Alors, aidé par notre professeur de
Physique-Chimie, M. Laclaverie, nous avons décidé d’aborder uniquement par
empirisme, sans aucune équation ni support théorique : réalisation de montages de
livres d’électronique et prises de mesures. Ce fut une entreprise assez folle… Et nous
avons nous-même parfois du mal à croire que de simples tests nous ont permis d’aller
si loin : jusqu’à un prototype fonctionnel.
En effet, l’étude des tensions, en particulier sur Latispro1, et les choix des
composants par déduction et essais successifs nous ont permis d’appréhender leur
fonctionnement, suffisamment pour les utiliser, probablement pas de manière
optimale, mais déjà de manière effective.
Nous vous présenterons d’abord le principe de fonctionnement des détecteurs
électromagnétiques de franchissement de feu rouge. Puis nous expliquons les deux
parties véritablement au cœur du montage : la détection et le déclenchement de
l’appareil photo.
Enfin, nous aborderons une question qui nous a tous taraudé depuis le début
du projet. Bien gentils garçons que nous sommes, déjà conducteurs pour certains
d’entre nous, c’est totalement innocemment que nous nous sommes posé l’inévitable
question : est-il possible de tromper le radar, pour « griller les feux rouges »
impunément et de manière purement hypothétique… cela va sans dire.
1 Logiciel d’acquisition utilisé par notre Lycée

4
Concours C.Génial – Les détecteurs de franchissement de feux rouges
La réponse sera donnée dans la dernière partie de notre travail. Face à ces résultats
nous nous sommes posés quelques questions sur les éventuelles sécurités des
modèles taille réelle…

Concours C.Génial – Les détecteurs de franchissement de feux rouges
5
I) Les « radars » de feu rouge
1.1 – Cahier des charges fonctionnel
La première étape de la réalisation de tout projet dont l’objectif est de parvenir
à la réalisation d’un objet répondant à un besoin précis est la rédaction d’un cahier
des charges, ce qui fut fait en Mars 2011.
1.1.1 – Introduction au problème
Nous nous proposons de réaliser un modèle réduit d’un détecteur de
franchissement de feu rouge, en se basant sur les contraintes de la réalité, et en
réutilisant les même principes de fonctionnement. L’objectif de la démarche est la
réalisation d’un prototype électronique fonctionnel, sans suivre de plans pré-établis
pour l’ensemble du projet. Il sera cependant possible de suivre des schémas-type
pour les modules du circuit, mais les réglages et les mises en relation de ces modules
sera faite de manière empirique, par essais successifs, dans le but de se familiariser à
la démarche d’essais et d’erreurs (trials & errors) pour arriver à une compréhension
pratique d’un système globalement inconnu.
L’ensemble du projet devra être financé par un budget de 300€, matériels
empruntés aux laboratoires du Lycée exclus.
Le groupe de travail sera constitué, exhaustivement, de : BELMAHI Faïçal,
CADOT Arnaud, LUGARDON Vladimir, MALAGUTTI Jean-Charles, et MICAS
Emmanuel.
Le professeur encadrant, LACLAVERIE Jean-Michel, procurera un support technique
et assurera la jonction entre le Lycée (frais, emprunts de matériel, responsabilité,
utilisation des locaux…) et le groupe.
1.1.2 – Expression fonctionnelle du besoin
Notre projet devrait se plier à plusieurs contraintes, ainsi que remplir
parfaitement certaines fonctions. Le prototype devra :
- Respecter les bases du modèle taille réel. Le prototype devra donc au
minimum posséder deux bobines, un appareil photo, un flash, un feu tricolore
et une ligne au niveau dudit feu.
- Fonctionner de manière similaire au modèle taille réelle. La prise de photo ne
doit se faire qu’en cas d’infraction. L’infraction est définie par un
franchissement des roues avant du véhicule de la ligne de feu, si ce dernier est
rouge uniquement.
- Être capable de prendre deux photos du véhicule détecté. La plaque
d’immatriculation, si présente, doit être visible. Dans l’idéal, chaque photo
devrait être prise de part et d’autre de la ligne du feu de signalisation, mais une
marge d’erreur sera admise : il faut simplement que l’une des photos montre la
voiture en infraction.
- Être capable de détecter une masse métallique en mouvement, à travers une
épaisseur de bois de 1.5cm, sans aucune marge d’erreur.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%