Modèle d`article - Université d`Angers

C2i 2013 Lyon
Instrumentation et capteurs innovants
appliqus au phnotypage automatis des vgtaux
!" ##$
1 Laboratoire d'Ingnierie des Systmes Automatiss (LISA), Universit d'Angers,
62 av. Notre Dame du Lac, 49000 Angers, France.
2 Universit de Lyon, CREATIS ;CNRS UMR 5220; INSERM U1044;
Universit Lyon 1; INSA Lyon, 7 av. Jean Capelle, 69621 Villeurbanne, France.
david.rousseau@univ-lyon1.fr
Abstract: % & ' """ ! ()
**&)+,((!-"!)&"('*.'
&(&.( /./!&)'0"
1*+%"*('(*")*&
.((*)&&("-2-)/+
Mots cles : &')&)'*"3"*/&(4&)
*5"&'"+
1. Introduction
()/")6'*")**7#,8&&)15
9&)))*&)+&'))
")2:*"6*/''"&-)5"6-!*-15
!! " &) " ) "5!)&&* 1 & "
1)- (*-") (*&+&*
"6!/)*)*&)*"&!))"9&&"
1' &) &5 &) &" * "65" ; " !))
'*1"5&)&5")&&!))+"#,&
)&)*5)&)"5!)&&*5"&)'*"6*
"6*/&-)"&(52&")/&&)"&)6;""69
"'*1*&&)*&5("'*"
!5/595"5)/52&)!*"+
&)'*5&&)6);<&)))*"=/+
&&&5-&)*"6-!-)"
"6-)&)'*"&(52&/"6/>?+
6ème Colloque Interdisciplinaire en Instrumention, 29-30 janv. 2013, Lyon, France.

C2i 2013 Lyon
2. Mesurer le branchage des plantes
6)2 " )6( " -(/ " &) *& & )
*&5( '"*)"&"* &)&)
&&)'&1)')!)(51"&)*)+9
* "65@ & ) -)/ ) " "9A" " -(/+
))**2&1*5)5*2"6-*57!
/+8+6&5!))*))*)A"5-)'))/
")&)+&!")* ;2& "*+,"6-")-
*56&"&5&@*-15(*&+&))
)*!"5!)&&5*&'))5&)" ;-)
' &)'* "3" 7! /+ $8+ 2:* ) *&)
&*:1"5)!5)1&&));)65*""9/
*5))1+&)555(9"&*:'"**
)'*16(9")6))/)5&5")&""2:*;BCD/+
6*"&"$(!&5"))2&1*"EE
*:+
1*))!)-*5*&')&5
)*+)'&'*&))&)&5"9&"A"+
&&( ;)"2:*"!+"&
&)!&"'))/)6"&)*5&*"*&)5
&*-"6)"65" ;)*&): "-(/
*)/5)'))/>$?+"&)&)5**))1!
"55&&(&*"! ;!)'))/5&
5"-(/+!)5"&'"*/&(;24**
)/+$+9&5*)*/&(5&&)-*5")+
!&*&5)5"*"6A"F*2"-
*5"*&"6)/))-"&/)5&)*5">G?+65
)**&-*5"EH*2**)
)*-*5)&/)*/")*/&(+
5&-)&16)&";)6""/"")65
"*!)-*5+6)"6*/&(-*5")&@
:)*!"95"5)I:5)!5"6)&&)+)
"&59'"5*&"&&)"5"59&)!"I
-&*&(-'7")6""1)1$E;JE&"&&)8
1 ) 2:* &5)* "&5 & ) -*5")+ 65@ ) *&
"61""51:+*&")/("
&)"!@ *5+*/*/&("&)&*5/)*
"65";"*-***)!5")6-)5"
!)'))/+*5(";&)-I5/)*!/-)&
)'))/&5")1!"5!)&&5")
!+

C2i 2013 Lyon
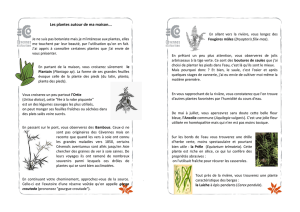
Figure 1 : Mesure manuelle actuellement ralise par les biologistes.
3. Mesurer le feuillage des plantes
*&):"'))/6&=5&
1-)/1+6!)&&/)-5&)'))/&&9*&)
&5'*5&1')!)*)"6&)+
1)' " !)&& ' &' & -! "
!)"&(/&(>F?+!)*1&5
!)&&*2"6&)2(5!&"!7!/+
$8+
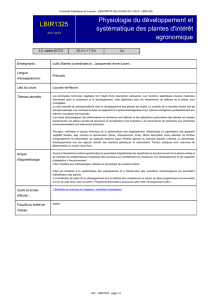
Figure 2 : Capteurs innovants, (A) mesures au champ avec compas sans fil, (B)
mesures sans contact avec tomographie X, (C ) mesures du feuillage sur plateau
tournant synchronis avec camra de profondeur.
ABC

C2i 2013 Lyon
2:*))"&)&!&=16;J/5)1)1*
B$*/7*)J"/58+&)55"5;)5)
"2:*'&&"6'*;'*K&;
&L"JM;I-)+'"/')5'95)&
;!))"JM+'(&1&)5)'&*&)
*-"/16))!&+ '55"5!)&&5&))!55
""&")6!)&&/)-+))""&1)6&
9!'"5)/+G+
Figure 3 : Mesures automatiques ralisables sur les images issues du systme
d'acquisition de la Fig. 3C. ")&)78!"'*5*&)7'8
&5*:")N!)&&!97878/78*
)/7O8*:"7'85*:"78*-"
**")N!)&&!9**)78+
"&*51&@5!"*9&*5&
"&)"69&")""6)2))7**">F?8+*-"
**")6!)&&!9"&9*&)):&)**&"
)6!)&&951")*&")678")6'*57'8*)

C2i 2013 Lyon
*&5"'))/;)65")6!)&&+**"&1
)JM)5/)*&-)"6&&5)2*5"&)&&&;("
"&+"&*5)/+G&&)15"!
-5"6*/ O+-!5/)*&)!*5"
&'">J?+&""*/"2&"))!-))/+F!)!
;5!)*"'))/+&)/)6*/ O)6*/"
&'"(&1')'*")&);)')&'"+
)5/)*&-)"*-)'*!""9*5+
9*&))/+F)65)/"'"(*/:!"-=&5
;)6:)*(;/(-(;"+))/&'"
&*"/*)&)@/@5&"5')")6*/ O+
/*")&)&'"&@&&)15***1
-&/*)&)")6*/ O+
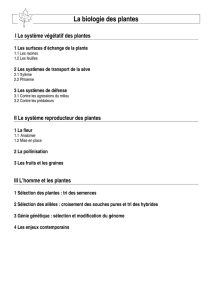
Figure 4: à gauche une image RGB d'un rosier et à droite la carte de profondeur de
la même plante en millimtre+
)9""*P)6'*-)/1&;)65())/)-)"
'))/*!"("'))+6&9*&)))1)6
(( ;"5)&5"&(/: ;)'"'))+6&"
'))'(-))*!))*+!*51Q(&!
'*1**5"&'"15)!!"
")/*"'));"*5""'*&(2)/1
7(*/&((2&&)')"()&(2))8>JC?+!**
"5'&5"/)&))/)"9*/)*
"&'"+*5"6/!)")(2&1"&)
1 )6 ( )2+ '9 / " &)9 /) &)5
(0)*;!))5/)"*@*""/"1)65*
"9'))1"';16!""("&)9
!-)+&("6)&/5)5(1&)"
(""9*")5"6*/+)/5)5)&)"6*/
 6
6
1
/
6
100%