Exercice écrit Commande des entraînements à vitesse variable

Page 1 / 4
Campus de Gif
2ème Année 2004 - 2005 Date : 1
er
février 2005
Séquence 6 – DAG1 Heure : 10h- 12h
Durée : 2 heures
Exercice écrit
Commande des entraînements à vitesse variable
(Seuls documents autorisés : polycopiés de l’Ecole et notes personnelles de l’élève)
Partie 2 (12 pts)
Vélo électrique à assistance au pédalage
On s’intéresse à l'étude d'un vélo électrique à assistance au pédalage. Le développement des modes de
déplacements alternatifs est un objectif pour l'amélioration du cadre de vie et la diminution de la pollution
automobile.
Le vélo électrique est un cycle sur lequel on adapte un moteur électrique à courant continu de petite
puissance, alimenté par une batterie. L'énergie fournie permet de diviser l'effort par deux environ et ne
peut, à elle seule, assurer la propulsion du vélo. L'autonomie sur le plat est aujourd'hui de l'ordre de 30km
avec un effort musculaire relativement faible. L'intérêt de cette solution réside dans le fait que le cycliste
demeure un cycliste. Cependant, la réglementation impose pour rester dans la catégorie des vélos (et non
cyclomoteurs ou scooters) de couper l'assistance lorsque l'on ne pédale pas et aussi au delà d’une certaine
vitesse (soit à l’heure actuelle 25 km/h).
La demande est variée, elle est à la fois d’ordre privé (déplacement urbain, randonnée accessible aux
cyclistes non sportifs, aide aux asthmatiques pour retrouver le souffle, aide aux enfants bronchitiques, ...),
et d’ordre institutionnel (pools de location de vélo, livraison par triporteur, ...). Le vélo électrique reste
tout de même un vélo utilitaire pour de nombreux utilisateurs (postiers, policiers, livreurs, … ).
Un schéma simplifié de la chaîne de transmission est donné par la figure 1 suivante.
Moteur
Réducteur
Pédale
Roue
motrice
Boîte
de vitesse
Couronne Pédale
Figure 1. Schéma simplifié de la chaîne de transmission

Page 2 / 4
A. Etude des couples résistants
A.1
On désigne par r
C
le couple total résistant au niveau de la roue motrice :
calculer r
C
sachant que ce couple est la somme de trois couples: roule
C
, le couple dû au roulement du vélo
sur la route, vent
C
le couple dû à la résistance au vent et
pente
C
le couple dû à la pente de la route. On se
place dans l'hypothèse des données suivantes :
- cycliste de masse 70 kg,
- masse du vélo de 28 kg,
- accélération de la pesanteur 2
/10 smg ≈
.
- coefficient de roulement de
mm6
=
δ
(indication:
×=
δ
roule
C
Poids total),
- vitesse de 15 km/h,
- rayon de la roue
mmr 325
=
,
- coefficient de traînée
1=
trainée
c
,
- résistance de l'air
3
/22,1 mkg=
ρ
,
- surface 2
75,0 mS =
(indication:
traînéevent
cVSrC
2
5,0
ρ
=
),
- pente de 3%,
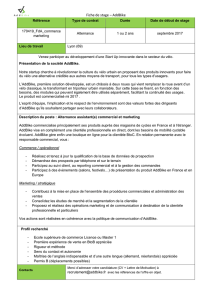
B. Chaîne de transmission
Pour toute la suite du problème et en guise de simplification, on considère que le cycliste roule sur une
route plate. Le schéma synoptique de la chaîne de transmission est donné par la figure 2.
Lorsque la vitesse du cycliste est de 15km/h et le rapport de vitesse est égal à
8,1
=
q
(en 4
ème
):
B.1 Calculer la vitesse de pédalage (en tr/mn)
B.2 Calculer la vitesse du moteur (en tr/mn)
Réducteur
cm
NN 35
=
Moteur Boîte de vitesse
cr
NqN
=
q
= [1 1,2 1,5 1,8]
Roue
Pédale
m
N
c
N
r
N
Vitesse /sol
V
Couronne
Figure 2. Schéma synoptique
C. Etude en régime statique du moteur
C.1. On suppose que le cycliste apporte un couple identique à celui du moteur au niveau de la couronne,
déterminer alors le couple développé par le moteur.
C.2. En déduire le courant d'induit, le moteur utilisé a pour paramètres:
Ω
3,1
=
R
,
ANmK
c
/05,0=
,
sradNmK
e
//05,0=
.

Page 3 / 4
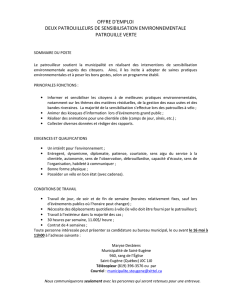
C.3. Calculer la tension d'alimentation de l'induit.
Hacheur
Le schéma d'alimentation du moteur est donné par la figure 3 ci-dessus :
T
m
u
D
VU 24
0
=
T
i
MCC
m
i
T
u
d
u
d
i
Figure 3. Schéma d'alimentation du moteur
C.4. Calculer le rapport cyclique du signal de commande du transistor pour obtenir la valeur moyenne de
la tension aux bornes du moteur trouvée à la question C.3.
C.5 En négligeant l'ondulation du courant dans le moteur, tracer la forme d'onde de
)(ti
T
,
)(tu
T
,
)(ti
d
et
)(tu
d
pour ce rapport cyclique, la période du signal de commande du transistor est
T
.
D. Etude en régime dynamique
Comme précédemment, on suppose que le cycliste apporte toujours un couple identique à celui du moteur
au niveau de la couronne. L'inertie totale au niveau de la roue est
2
3,10
mkgJ
tr
=
.
D.1. Donner l'expression du couple résistant ramené sur l'arbre du moteur en fonction de la vitesse
linéaire du cycliste, V, le rapport de vitesse
q
est égal à 1,8 (en 4
ème
).
D.2. Ecrire les équations mécanique et électrique du moteur (ramenées sur l'arbre moteur).
D.3. En choisissant comme variables d'état la vitesse du moteur et le courant d'induit, soit
),(
mm
IX
Ω
=
. La sortie de ce système est la vitesse de déplacement du vélo,
Vy
=
, la
commande est la tension aux bornes du moteur, écrire la représentation d'état non linéaire sous la
forme :
)(
),(
Xhy
UXfX
=
=
&
D.4. Déterminer le point d'équilibre de ce système,
),(
memee
IX
Ω
=
, pour lequel la tension aux bornes
du moteur est
0
Uu
me
α
=
, avec la valeur de
α
calculée à la question C.4.
D.5. Donner le linéarisé tangent autour de ce point d'équilibre sous la forme:
xCy
u
B
x
A
x
=
+
=
&

Page 4 / 4
D.6. Etudier la commandabilité de ce système.
D.7. Les capteurs de vitesse angulaire du moteur et de courant sont supposés comme étant des gains
unitaires, déterminer la loi de commande modale
)(
texLu
+
−
=
qui confère au système un
amortissement
2,1
=
ξ
et une bande passante
srad
/5,0
0
=
ω
. Préciser le signal
)(
te
qui permet
d'assurer que
erefm
t
t
ΩΩΩ
==
∞→
)(lim
.
D.8. Tracer l'allure de la réponse temporelle en boucle fermée, de la vitesse de déplacement du vélo, en
indiquant les valeurs caractéristiques.
D.9. On veut réaliser une commande numérique. En réalité, le capteur de vitesse se trouve au niveau de
la couronne et a pour gain
c
G
. Ecrire l'équation discrétisée de la commande en précisant un choix
de période d'échantillonnage. Etablir le schéma bloc de l'asservissement du système global,
structuré en 2 blocs principaux, en prenant soin de faire aussi apparaître la vitesse linéaire du vélo,
la vitesse de pédalage et le couple résistant.
1
/
4
100%