"Capteur Inertiels".

!"#$%&'()*+%',%-().)/"(%)0%)
1213)
4*5*$'*)6"-"789)
:)
3955"*'%)
• ;'*+<*#%)0%)=9+<,9++%5%+$)0%()<"#$%&'()
*+%',%-()
• !95#9("+$%()0%()<"#$%&'()*+%',%-(>)
– ?@(9+"$%&'())
– A'"+(0&<$%&'())
– B+$%'="<%()@-%<$'*C&%()
• ;'@(%+$",9+)0&)5*+*D#'9E%$)F)<9+<%#,9+)
0G"<<@-@'95H$'%)I)
J)
;'*+<*#%)0%)<"#$%&')*+%',%-))
• K%()<"#$%&'()*+%',%-()<"'"<$@'*(%+$)0%()
#L@+95H+%()-*@().)0@#-"<%5%+$).)M*$%((%)
M"'*"/-%)N"<<@-@'",9+O)%$).)-")P'"M*$",9+Q))
• 2R%5#-%)>)"<<@-@'95H$'%)NM9*$&'%S)"M*9+TOS)
P7'9(<9#%)N9'*%+$",9+)0&)M%<$%&')0%)<L"5#)
P'"M*$",9++%-O))
• U&)<V&')0%)<"#$%&')*+%',%-)>)&+%)5"((%))
W)
;'*+<*#%)0%)<"#$%&')*+%',%-))
• X+%)5"((%)>)&+%)(9&'<%)0%)-")=9'<%)0G%+$'@%)
• !"#$%&')0%)P'"M*$",9+>)!Y5"#
• !"#$%&')0G"<<@-@'",9+)>)!YD5$##
• %&'#($)*&+,'#-.&,/&0'#1&'+,&.*#0$#23,(&#!#
5)
!#
$#
R)
Z)

;'*+<*#%)0%)<"#$%&')*+%',%-)
• !955%+$)5%(&'%')&+%)=9'<%)[))
– KG"((9<*%').)&+)'%((9'$)
– 1%(&'%')-")0@=9'5",9+)0&)'%((9'$)N#'*+<*#%)0G&+%)
/"-"+<%O))
5)
R)
5)
!# 8)
8)
R) \)
RY]^8)
_)
;'*+<*#%)0%)<"#$%&')*+%',%-)
• 2($D<%)&+)'@(9+"$%&')[)
)
• `&*)a)3"<L"+$)C&%))))))))))))))))))))))S)9+)")RYaext/ω02)
• Plus)ω0)est)grand,)plus)x)est)pe4t)
5)
R)
5)
!# 8)
8)
R) \)
x=F/k=maext/k)
ω
0=k/m
b)
;'*+<*#%)0%)<"#$%&')*+%',%-)
• c'&*$)0"+()-%()"<<@-@'95H$'%(>)-*5*$%()
#L7(*C&%().)-")'%(9-&,9+)
• 4"+()&+%)/"+0%)0%):)deS)-%)'Q5Q(Q)0%)-")=9'<%)
0%)/'&*$>)
• ;9&')-G"<<@-@'",9+>))
• =\YJWQf)8deS)5YJQJ%D:\)8PS)gY_>)
))))"+S'5(YZQh%DW)5^(J)9&)\Q_5"^de:^J)
F
n=4kbT
µ
an,rms =4kbT
ω
0
mQ
f)
;'*+<*#%)0&)<"#$%&')*+%',%-)
• B-)(G"P*$)09+<)0%)5%(&'%')-%)0@#-"<%5%+$)a))
• K*%+)%+$'%)-%)0@#-"<%5%+$)%$)-G"<<@-@'",9+)[)
K")-9*)0%)i%j$9+)@<'*$%)0"+()-%)'%#H'%)-*@)"&)
(&##9'$)0%)-")5"((%)59/*-%)Nx)(&')-%)$'"+(#Q)
#'@<@0%+$O))
• 4"+()-%)095"*+%)0%)K"#-"<%>))
)
−kx −
µ
x+F=m
x, où F=−maext ou F=mg
x(p)
F(p)
=1
k+
µ
p+mp2,
h)

;'*+<*#%)0&)<"#$%&')*+%',%-)
• 3<L@5")%+)/9&<-%)9&M%'$%)>)
• 3<L@5")%+)/9&<-%)=%'5@%)>)))
1"((%k'%((9'$)
N'@(9+"$%&'O)
]9'<%))
0G%+$'@%) 4@#-"<%5%+$) l)
!)
!"#"<*$@) !)
X)
A%+(*9+)
1"((%k'%((9'$)
N'@(9+"$%&'O)
2''%&')0%)
)$'"*+"P%) l) !)
!"#"<*$@) !) X)
k)
]) X)
]9'<%))
0G%+$'@%)
]9'<%)0%)<9+$'%D'@"<,9+)
4%#-Q) !9''%<$%&')
N;BS);B4TO)
`&$)
D)
m)
;'*+<*#%)0&)<"#$%&')*+%',%-)
• !9+M%'(*9+)F)#9(*,9+D$%+(*9+)I)>)<"#"<*,M%)9&)
#*@e9@-%<$'*C&%)
• i95/'%&(%()$%<L+*C&%()0%)5%(&'%)0%)-")<"#"<*$@)n)<=Q)
#-&()-9*+)
• c9&<-%)9&M%'$%)9&)/9&<-%)=%'5@%)[)c9&<-%)=%'5@%)a)
;9&'C&9*)[))
– A9&()-%()/*%+="*$()0%)(7($H5%()%+)/9&<-%)=%'5@%)n)
"5@-*9'",9+)0%)-")-*+@"'*$@S)0%)-")/"+0%)#"(("+$%S)0%)-")
($"/*-*$@)
– 37($H5%)#-&()<95#-%R%S)<"')+@<%((*$%)&+%)$'"+(0&<,9+)
F)$%+(*9+D=9'<%)IS)5"*()+"$&'%--%5%+$)="*("/-%)"M%<)1213Q)
:\)
1%(&'%)0%)-")#9(*,9+)
• !L9*R)0&)$'"+(0&<$%&')<"#"<*,=)>)<NRO)%($)
-*+@"*'%^+9+D-*+@"*'%)
• !L9*R)0%)-")5%(&'%)0*o@'%+,%--%^&+*#9-"*'%))
::)
1%(&'%)0%)-")#9(*,9+)
• !L9*R)0%)-")5%(&'%)0*o@'%+,%--%^&+*#9-"*'%))
• A%<L+*C&%)0%)-")5%(&'%)0%)-")<"#"<*$@)[))
:J)

1%(&'%)0%)-")#9(*,9+)
• 1%(&'%)0%)<"#"<*$@)F)&+*#9-"*'%)I)>)
"5#-*p<"$%&')0%)$'"+(*5#@0"+<%))
• `+)5%(&'%)-")M*$%((%)%$)+9+)#"()-")#9(*,9+)(*)
q()%($)&+%)(9&'<%)4!a)) :W)
1%(&'%)0%)-")#9(*,9+)
• 1%(&'%)0%)<"#"<*$@)F)&+*#9-"*'%)I)>)
"5#-*p<"$%&')0%)$'"+(*5#@0"+<%))
• B<*S)q()%($)U!S)9+)5%(&'%)-")#9(*,9+)a))
• r)C&9*)(%'$)-")'@(*($"+<%)?])[))
:Z)
1%(&'%)0%)-")#9(*,9+)
• 1%(&'%)0%)<"#"<*$@)F)&+*#9-"*'%)I)>)<"#"<*$@()
<955&$@%())
• s:S)sJ)>)-%()L9'-9P%()%+)9##9(*,9+)0%)#L"(%))
• 1%(&'%)0*'%<$%)0%)-")<"#"<*$@)a)B+(%+(*/-%).)-")
<"#"<*$@)#"'"(*$%)
)
:_)
1%(&'%)0%)-")#9(*,9+)
• 1%(&'%)0%)<"#"<*$@)F)&+*#9-"*'%)I)>)0@$%<,9+)
(7+<L'9+%)
• KG"M"+$"P%)>)'@<&#@'",9+)0&)(*P+"-)).)/"((%)
='@C&%+<%S)$'H()p"/-%))
• KG*+<9+M@+*%+$)>)+@<%((*$%)&+)p-$'%)"+"-9P*C&%)
:b)

1%(&'%)0%)-")#9(*,9+)
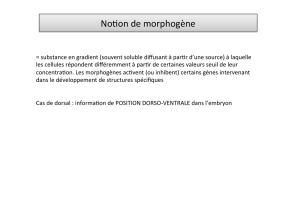
• 1%(&'%)0%)<"#"<*$@)F)0*o@'%+,%--%)I)>)#'*+<*#%))
Sensors 2013, 13 5725
another output node. With this strategy and external swapped wirings, a full sensing bridge can be
constructed, as described in the following paragraphs. Figure 3(b) shows the cross-sectional view of
the combined layers for the mechanical connection of proof mass pieces (2) and (3). The gap between
the two diagonal pieces and the whole large piece are used for mechanical connection and electrical
isolation [14].
The inset in Figure 3(a) shows the connection of individual comb finger pairs. Connections of two
pairs of the sensing comb drives are illustrated. The two types of stator electrodes that are both
anchored to the substrate are electrically isolated from each other. The same type of stator electrodes
are electrically connected differently for differential sensing. As shown in the figure, while the two
lower stator electrodes in both pairs are directly connected using the nickel metal, the two upper stator
electrodes are electrically connected using the doped polysilicon layer underneath the structure
material. While the polysilicon layer is isolated from the lower electrodes, it is connected to the upper
electrodes in the anchor pads.
Figure 4. Electrical equivalent circuit for the common-centroid configuration of the
sensing capacitors.
Figure 5. Simplified equivalent circuit of the sensor.
C4
C3
C2
C1
m
V
out
V
out
V
m
V
C4b
C3b
C2a
C1b
C1a
C2b
C3a
C4a
m
V
m
V
out
V
out
V
1%(&'%)0*o@'%+,%--%)n)(9',%)&+*#9-"*'%)
1%(&'%)0*o@'%+,%--%)n)(9',%)0*o@'%+,%--%)
:f)
1%(&'%)0%)#9(*,9+))
• 1%(&'%)0*o@'%+,%--%)
)n)(9',%)&+*#9-"*'%)
• 1%(&'%)0*o@'%+,%--%)
)n)(9',%)0*o@'%+,%--%)
37
Figure 3.1: Schematic diagram of a reported capacitive microaccelerometer.
Figure 3.2: Schematic diagram of a fully-differential capacitive microaccelerometer.
At the sensor-IC interface, a switching architecture is devised such that the charge
amplifier can interface with “four” changing capacitances having one common node at
the proof mass (two increasing and two decreasing). The proof mass is tied to a DC
voltage at all times and is never switched, which reduces the switching noise. The
micro-gravity SOI accelerometer is fabricated through the backside dry-release
process introduced in Section 2.3. The SOI accelerometer is wirebonded to the
interface IC and characteristic results are obtained.
37
Figure 3.1: Schematic diagram of a reported capacitive microaccelerometer.
Figure 3.2: Schematic diagram of a fully-differential capacitive microaccelerometer.
At the sensor-IC interface, a switching architecture is devised such that the charge
amplifier can interface with “four” changing capacitances having one common node at
the proof mass (two increasing and two decreasing). The proof mass is tied to a DC
voltage at all times and is never switched, which reduces the switching noise. The
micro-gravity SOI accelerometer is fabricated through the backside dry-release
process introduced in Section 2.3. The SOI accelerometer is wirebonded to the
interface IC and characteristic results are obtained.
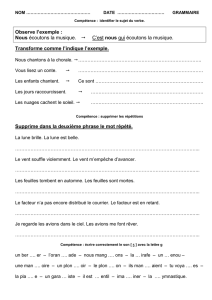
:h)
1%(&'%)0%)-")#9(*,9+)
• 2R%5#-%)0G&+)<*'<&*$)<95#-%$)#9&')&+%)
<9+pP&'",9+)0*o@'%+,%--%)N;L4)0%)UQ)c"/"8O)
40
Figure 3.5: Schematic diagram of a reference-capacitor-less SC readout circuit.
The amplification capacitors are binary-weighted and are programmable through a 4-
bit digital word. The fully-differential scheme helps to reduce common mode noise
such as the substrate noise. Using CMOS switches, there is no need for the delayed
version of the non-overlapping clocks. There are two clock phases, φ1 & φ2, involved
in the circuit. In the sampling phase (φ1=high, φ2=low), C
S1,2 and CR1,2 are charged
with 0.5VDD and amplification capacitors (CA1,2) are discharged to zero (Figure 3.6).
Figure 3.6: Equivalent circuit of the SC charge amplifier in the sampling phase.
:m)
1%(&'%)0%)-")#9(*,9+>)<9+<-&(*9+))
• 1%(&'%)0*o@'%+,%--%)9o'%)0"M"+$"P%)0%)
(9&#-%((%)#9&')'@"-*(%')-%()<*'<&*$()
@-%<$'9+*C&%()
• K%()<"#"<*$@()<955&$@%()9&)&+%)0@$%<,9+)
(7+<L'9+%)(9+$)0%()$%<L+*C&%()&,-*(@%()#9&')
5%(&'%')&+%)<"#"<*$@)
J\)
 6
7
6
7
1
/
7
100%