AstroImagine - Société Astronomique de Genève


1. Qu'est-ce qu'un CCD?
De l'observation visuelle à l'imagerie numérique:
L'instrument (télescope ou lunette) est utilisé afin de concentrer les rayons lumineux en provenance
de l'objet observé, l'oculaire quant à lui projette l'image située au foyer vers une surface sensible.
Dans le cas d'observations visuelles, la rétine sert de système d'acquisition et le cerveau de système
de mémorisation de l'information. Cependant, les astronomes se sont très vite rendus compte que ce
système était relativement peu sensible ("le temps de pose" de l'oeil est d'environ 1/10s.). Un système
qui présente une sensibilité accrue est le film photographique. Dans ce cas, le film placé au foyer,
assure à la fois la fonction d'acquisition et de mémorisation. Son succès fut très grand pendant de très
nombreuses années mais depuis 1960 sa contribution à fortement diminuée au profit des caméras
CCD beaucoup plus rapides et beaucoup plus sensibles. Le principe d'enregistrement d'une image est
identique à l'astrophotographie sauf que la surface sensible correspond à une matrice CCD qui assure
la fonction d'acquisition. La fonction de mémorisation est réalisée par un ordinateur (mémorisation
d'informations sous forme numérique). L'évolution dans les techniques de prise d'images traduit donc
la recherche d'une sensibilité accrue (qui nous permet d'obtenir des images d'objets plus faibles et
plus rapidement).
Présentation d'un capteur CCD:
Le terme CCD nous vient de l'anglais et signifie Charge Coupled Device (en français Dispositif à
Transfert de Charge, DTC). Une matrice CCD est composée d'un grand nombre de micro-cellules
juxtaposées, en général carrées ou rectangulaires, sensibles à la lumière que l'on nomme pixels
(contraction du terme anglais picture element). Chaque pixel correspond à un point de l'image, comme
l'est chaque grain d'argent d'une émulsion photographique. La différence réside dans le fait que si les
grains d'une film sont répartis de manière aléatoire et ont des tailles diverses, les pixels d'un capteur
sont ordonnés suivant des lignes et des colonnes et ont tous la même taille (environ 10 microns). Si
en photo, la lumière interagit avec les grains d'argent pour former une image, en imagerie numérique,
nous allons utiliser l'effet photoélectrique, c'est-à-dire, l'arrivée d'un photon sur le silicium qui va
générer un électron. Chaque pixel, que l'on peut assimiler à un puits (avec une certaine taille et une
certaine capacité), crée et accumule un nombre d'électrons proportionnel à la quantité de lumière
reçue. Ce sera donc la lecture de ces charges électriques accumulées par les pixels qui nous
permettra de reconstituer l'image.
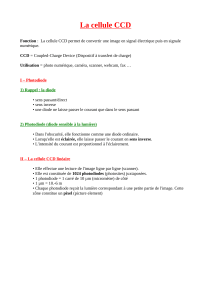
Fonctionnement d'un CCD:
Pour lire l'image que le capteur a enregistré, il va falloir récupérer la quantité d'électrons contenue
dans chaque pixel. C'est pourquoi une partie importante d'une caméra CCD est l'électronique. Un
double système d'horloges va générer des signaux de lecture, l'une pour transférer les charges de
lignes en lignes jusqu'au registre horizontal, l'autre pour déplacer les charges de ce registre sur le
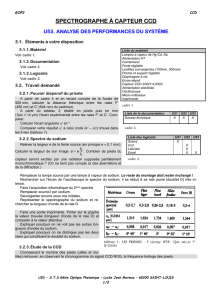
pixel voisin. La charge située dans le dernier pixel sera alors "emportée" vers le registre de sortie. Les
charges électriques seront ensuite amplifiées et converties en valeurs numériques afin de pouvoir être
lues par un ordinateur et enregistrées dans un fichier.
Déplacement des charges de ligne en ligne. (Cazard, J.-P., Pulsar 730)
AstroImagine, Astrophotographie & CCD
http://astrosurf.com/astroimagine
Copyright © Grégory Giuliani 2000-2004 All rights reserved.
- 2 -

Déplacement des charges vers le registre de sortie, amplification er conversion. (Cazard, J.-P., Pulsar
730)
Visualisation d'une image:
Une image CCD n'est donc qu'ensemble de valeurs numériques représentant la quantité de lumière
reçue par chaque pixel. Sur une caméra telle que la Starlight Xpress HX516, la charge électrique est
convertie en valeur numérique sur un échelle de 16 bits. Cette conversion permet d'exprimer 216
niveaux de gris, c'est-à-dire de 0 à 65535. La valeur de 0 correspond à un pixel avec un charge nulle
tandis que la valeur 65535 correspond à un pixel avec une charge maximale, on dit aussi que le pixel
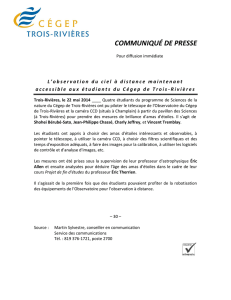
est saturé. Si cette valeur est dépassée, les électrons excédentaires vont déborder sur les pixels
voisins laissant apparaître sur l'image des traînées. Ce phénomène est connu sous le nom de
blooming; notons qu'il existe des dispositifs qui permettent de s'affranchir de ce problème.
L'effet du blooming. Image: BT-Atlas
Plus le niveau de codage sera élevé plus la dynamique sera importante, il semble qu'un convertisseur
12 bits soit un minimum. Lors de l'affichage d'une image sur un écran de PC, celui-ci ne peut afficher
au maximum que 256 niveaux de gris. Il faudra donc établir une correspondance entre la dynamique
que nous fournit la caméra et la dynamique de l'écran. Cette opération est connue sous le nom de
seuillage. On pourra ainsi faire correspondre la valeur du pixel avec celle de l'écran et ce à partir de
deux seuils: le seuil bas, où tout pixel ayant une valeur inférieur à ce seuil aura comme valeur 0 (et
apparaîtra donc noir), et le seuil haut, où tout pixel ayant une valeur supérieure à ce seuil sera
représenter par la valeur 255 (blanc).
L'équipement informatique:
L'ordinateur est partie intégrante d'un système d'imagerie numérique puisqu'il joue le rôle d'interface
entre la caméra et l'utilisateur (en général, la liaison se fait par le port parallèle). En effet, c'est grâce à
un PC que l'on peut donner les ordres de lecture ainsi que réceptionner, visualiser, stocker et traiter
les images. Pour ma part, je possède deux ordinateurs, un portable pour l'acquisition (Pentium
100MHz) et une station pour le traitement des images (Pentium III 450MHz). Le portable présente
l'avantage de pouvoir l'emporter dans n'importe quel endroit mais en général son prix est élevé. Il
AstroImagine, Astrophotographie & CCD
http://astrosurf.com/astroimagine
Copyright © Grégory Giuliani 2000-2004 All rights reserved.
- 3 -

s'agit donc de trouver un PC puissant et si possible pas trop cher. A cet égard ne négligez pas le
marché du matériel d'occasion où l'on peut trouver de bons ordinateurs. La puissance du PC n'est pas
très importante en ce qui concerne l'acquisition des images (à la Société Astronomique de Genève,
nous possédons une ST7 et pour l'acquisition des images nous utilisons un 486, le chargement d'une
image prend environ 20s.). Par contre, la puissance et la mémoire de l'ordinateur deviennent vraiment
importante lors du traitement des images. Je conseillerai donc un PC Pentium d'au moins 300MHz,
avec 2 Giga de disque dur, d'une mémoire d'au moins 32 Méga de RAM et d'un écran Super VGA
1024x758, 65535/16 Mio de couleurs.
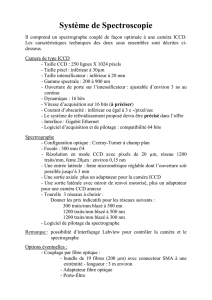
La caméra HX516 avec le PC portable et le boîtier d'alimentation.
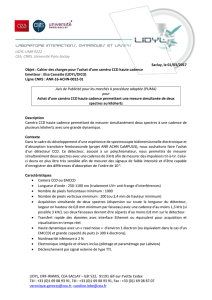
2. Caractéristiques et performances
Caractéristiques géométriques:
Lors du choix d'une caméra CCD, le premier critère à prendre en compte sera les caractéristiques
géométriques du capteur. Une matrice est composée de photosites qui ont une dimension, une forme
et un nombre. En astronomie, il est préférable d'utiliser un capteur avec des pixels carrés car lors de
l'affichage de l'image sur le moniteur, chaque point de l'écran (de forme aussi carrée) correspondra à
un pixel. Si les pixels sont rectangulaires alors l'image sera dilatée suivant un des axes. La taille des
pixels est importante car plus un pixel sera grand plus il pourra contenir de charges et moins vite il
saturera. Cette dimension est exprimée en microns (ceux du capteur KAF-400 de Kodak ont une taille
de 9 microns) et sa capacité en électron (les pixels du KAF-400 ont une capacité de 85000 électrons).
En général, les photosites sont jointifs ainsi toute la surface du capteur sera sensible à la lumière.
Néanmoins certains types de capteurs qui sont équipés d'un dispositif antiblooming ont une partie non
sensible à la lumière qui correspond aux drains qui permettent d'évacuer l'excédant de charge. Ces
zones non sensibles sont appelées zones mortes. Les CCD à transfert d'interligne, tel celui qui équipe
la caméra HX516 ont. également, des zones mortes. Elles ont peu de conséquence sur les images
mais peuvent induire des erreurs en photométrie. Le nombre de pixels du capteur est certainement la
caractéristique la plus importante car c'est ce nombre qui va fixer la richesse de l'information spatiale
de l'image. Le KAF-400 possède 765 sur 512 pixels ce qui représente une taille de 6,9 sur 4,6mm. Le
champ couvert par un tel capteur avec un C8 à f/6.3 est d'environ 19 par 12,6 minutes d'arc. On peut
le calculer à partir de la formule suivante:
Champ = arctg[(côté du CCD (mm)*10-3)/focale(m)]
Nous constatons donc que les matrices CCD ont de petites tailles en regard du format des films photo.
C'est là le principal "désavantage" des CCD. Il est évident que nous avons intérêt à choisir le capteur
le plus grand possible mais les prix croissent très vite avec leur taille. Cependant, on se rend vite
compte que les objets étendus, tels M42 ou M31 sont peu nombreux; nous sommes familiarisés avec
un certains types d'objets grands et lumineux de part notre pratique de l'astrophotographie. Les objets
plus petits et moins lumineux sont moins connus car plus difficiles à photographier. La grande
sensibilité des CCD permet d'imager facilement ces objets.
AstroImagine, Astrophotographie & CCD
http://astrosurf.com/astroimagine
Copyright © Grégory Giuliani 2000-2004 All rights reserved.
- 4 -

Le capteur de la HX516 (Sky & Telescope, Feb.98)
Caractéristiques optiques:
Il est intéressant de connaître l'angle de champ couvert par un photosite, c'est ce que l'on appelle
l'échantillonnage.
Cet angle dépend de la configuration optique choisie. Pour le calculer on peut utiliser la formule
suivante:
Echantillonnage = 206*(P*10-6/F)
où P est la taille du pixel en microns et F la focale de l'instrument exprimée en mètres. Le résultat
obtenu s'exprime en secondes d'arc. Pour un C8 à f/10 avec un capteur ayant des pixels de 10
microns on obtient un échantillonnage d'environ 1". En imagerie du ciel profond, nous choisirons un
échantillonnage en 1 et 4" et en imagerie planétaire, on le préférera entre 0,1 et 1 seconde d'arc. Si le
pixel couvre un angle trop grand et que les étoiles apparaissent carrées on parle de de sous-
échantillonnage; dans le cas contraire on parle de sur-échantillonnage. En général, on cherchera à
toujours avoir une largeur à mi-hauteur des étoiles qui occupera deux pixels.
Caractéristiques électroniques:
Nous avons vu précédemment qu'une partie importante d'une caméra CCD était constitué par
l'électronique. En général, on remarque que l'énergie mesurée dans les photosites et celle mesurée
dans l'ordinateur est différente. Cette différence de signal est appelée bruit. C'est une fluctuation de
valeur autour d'une valeur réelle.
Le bruit "total" possède trois composantes:
- le bruit de lecture qui est provoqué par la perte d'électrons pendant le transfert ainsi que par les
différents composants électroniques. Ce bruit est divisé par deux lors d'un abaissement de la
température de 7 degrés. Le bruit de lecture est une caractéristique de la caméra et doit être fournie
par le constructeur. Il s'exprime en électrons, par exemple pour le capteur Sony ICX084AL qui équipe
la HX516 le bruit de lecture en inférieur à 15 électrons. Ce bruit est l'une des principales limitations à
la détectivité des CCD. C'est un des paramètres importants dans le choix d'une caméra. Ce
phénomène n'est pas reproductible, on ne peut donc pas le corriger. Il est donc nécessaire de choisir
un capteur avec un bruit de lecture faible et un système de refroidissement (en général par des
modules Peltier) efficace.
- le bruit thermique. Une matrice génère des charges électriques indépendamment de tout
éclairement; ce phénomène est appelé courant d'obscurité. Là aussi la température du CCD à une
influence, tous les -6 degrés le courant d'obscurité est divisé par deux. Ce phénomène est en
moyenne reproductible, on pourra par conséquent le corriger partiellement avec un refroidissement
efficace et en prenant une image de correction (voir la section concernant le traitement des images).
Ce courant a pour conséquence de remplir les photosites de charges "inutiles" dont on pourra à peu
près tenir compte, mais qui peuvent provoquer une saturation si le temps de pose est suffisamment
long. Choisissez donc un capteur avec un faible courant d'obscurité. La valeur du courant d'obscurité
d'une caméra est aussi donnée par le constructeur, en électrons par pixels et par seconde. Pour le
capteur Sony ICX084AL, le courant d'obscurité est inférieur à 1électron/pixel/sec et la saturation est
AstroImagine, Astrophotographie & CCD
http://astrosurf.com/astroimagine
Copyright © Grégory Giuliani 2000-2004 All rights reserved.
- 5 -
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%