Nouveau capteur d`ondes acoustiques en milieu sous-marin

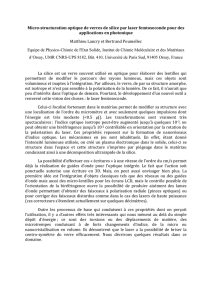
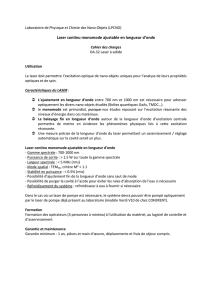
Le pas de ces miroirs de Bragg détermine la longueur
d’onde d’émission du laser à fibre. L’amplification est
obtenue généralement en dopant la fibre à l’Erbium [3].
L’émission est obtenue en pompant le milieu amplificateur
avec un laser de puissance. On choisit de pomper à la
longueur d’onde de 1480nm pour bénéficier de la faible
absorption de la fibre de silice à cette longueur d’onde .Le
principe de ce dispositif consiste à détecter les
changements de fréquence du laser .Les variations de
longueur de l’élément de fibre dopée, proportionnelles à la
pression acoustique (signal) se traduisent par un
changement de fréquence de la lumière émise que l’on
détecte. Pour pouvoir mesurer ces variations de façon
précise, le laser est incorporé au sein d’un système
acousto-mécanique qui grâce à sa sensibilité convertit les
déformations produites par l’onde sonore.
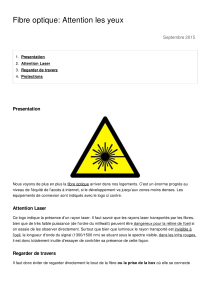
Figure 1.Schéma d’un laser à réaction distribuée
B. Sensibilité acousto-optique
Lorsque le laser à fibre est immergé, une onde
acoustique se propageant dans l’eau crée une variation de
pression hydrostatique qui modifie les dimensions du
réseau de Bragg donc celle de la cavité du laser. Il en
résulte d’une part un changement de pas du réseau de
Bragg et d’autre part une variation de l’indice du verre par
effet photo-élastique ce qui entraine un changement de
fréquence de la lumière émise. Pour le verre de silice et
au voisinage de =1550nm, on obtient une sensibilité
acousto-optique de
Panm
P/10.6,3 9
[2]. Ce niveau
est insuffisant pour pouvoir détecter le bruit de mer qui
détermine le plancher minimum du signal efficace de
pression d’où l’obligation d’incorporer notre laser à fibre au
sein d’un système acousto-mécanique (Figure2).
Résumé- Nous présentons un nouveau capteur à base de
laser à fibre dopée dont la sensibilité suffisamment
élevée permettra de détecter toutes les ondes
acoustiques d’intensité équivalente au bruit de mer. Les
propriétés particulières des réseaux de Bragg inscrits sur
fibre optique montrent qu’ils sont bien adaptés à la
détection en milieu acoustique pour de multiples
applications : prévention sismique, recherche pétrolière,
recherche gazière. Mais les bruits d’intensité et de
fréquence du laser limitent les performances de ce
capteur et dégradent le rapport signal à bruit. On se
propose ici de réaliser un capteur qui aura la sensibilité
acousto-optique la plus élevée pour minimiser l’influence
du bruit optique et réduire la pression acoustique
minimum détectable.
Mots clés : laser à fibre, sensibilité acousto-optique,
recherche pétrolière, prévention sismique, bruit
d’intensité, bruit de fréquence.
1. INTRODUCTION
Les lasers à fibre DFBFL : Distributed Feed Back Fiber
Laser, utilisés comme capteur acoustique ont rapidement
atteint et dépassé les performances des autres dispositifs,
en particulier les dispositifs à capteur piézoélectrique, pour
les applications sous-marines à grande profondeur [1]. Ils
sont en effet beaucoup mieux adaptés à ces applications :
leur faible dimension le rend pratiquement
omnidirectionnel, l’absence d’élément électrique et
électronique immergé augmente sa fiabilité, la partie
optique est insensible aux parasites radio-électriques. Il
est possible de concevoir des dispositifs de multiplexage
optique en longueur d’onde pour pouvoir connecter un
grand nombre de capteurs DFBFL autour d’une seule fibre
[2].
2. DESCRIPTION GENERALE DU SYSTEME
A. Principe de fonctionnement du capteur
Le détecteur au cœur du projet est un hydrophone à
laser à fibre. Ce laser est constitué par un segment de fibre
optique de quelques centimètres de longueurs sur lequel
on imprime un réflecteur de Bragg (Figure 1).
Nouveau capteur d’ondes acoustiques en milieu sous-marin à base de
laser à fibre dopée
1 T.Souici, 1B.Orsal, 2B.Wattrisse, 3R.Vacher
1 IES, CNRS UMR 5214/UM2, 2 LCVN CNRS UMR 5587 UM2, Place Eugène Bataillon, F-34095 Montpellier Cedex 05, France
3LMGC, CNRS UMR 5214/, UM2 Campus Saint Priest, F-34095 Montpellier Cedex 05, France
1Mohamed-tahar.Souici@ies.univ-montp2.fr
1[email protected]2.fr

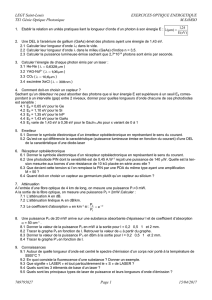
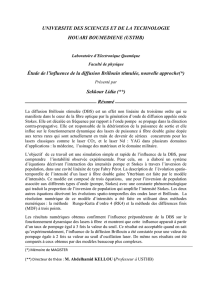
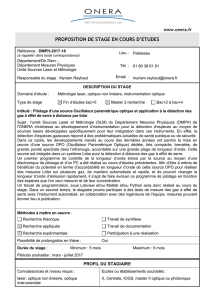
dont l’objectif est d’augmenter autant que possible le
gain allongement de la fibre laser/pression acoustique :
sensibilité [4]. Ceci doit être réalisé avec comme
contrainte imposé par le cahier des charges la pression
nominale hydrostatique de 600 bar à 6000m de
profondeur.[2]
Figure2-coupe schématique et modèle mécanique de
l’hydrophone à traction de fibre
Le modèle, qui relie la variation relative de longueur
d’onde
B
d’une cavité laser pourvue de miroirs de Bragg
DFB à la variation relative de longueur L de celle-ci, a été
proposé par de nombreux groupes de recherche
travaillant dans ce domaine des réseaux de Bragg réalisés
sur fibre utilisés comme capteurs de contrainte [2 ],[3] :
L
L
B
B78,078,0
(1)
B
est la longueur d’onde du réseau de Bragg fixée par le
pas du réseau, L est la longueur de la cavité laser, neff :
indice effectif.
effB n2
(2)
Dans un précédent travail nous avons exprimé la variation
de longueur d’onde en fonction de la variation de
pression : sensibilité acousto-optique [2]
]][[P
L
LP
SBB
AO
(3)
).78,0).(( LK
A
P
SSS BB
OMAMAO
(4)
Nous remarquons que la sensibilité acousto-optique SAO
est le produit de la sensibilité acousto-mécanique SAM
(nm/Pa)= (A/K) (A : section active de détection, K :
coefficient de raideur du capteur) et la sensibilité opto-
mécanique SOM=(0.78 B/L)=2,4282.10-5(sd) qui est
intrinsèque au réseau de Bragg et qui prend en compte la
longueur de la cavité et la longueur d’onde d’émission B.
C. Description du montage
Figure 3-Montage expérimentale
Le montage expérimental est décrit FIG 5. A partir
d’une station d’émission/réception qui se trouve sur le
littoral. On fournit une certaine puissance par avec un
laser de pompe à une longueur d’onde de 1480nm à un
laser à fibre DFBFL qui est utilisé comme capteur. Le laser
à fibre va émettre autour d’une longueur d’onde de
1552,06nm dépendant de la pression acoustique à
laquelle elle est soumise. On utilise un interféromètre
Fabry-Perot accordable avec un élément piézoélectrique
pour accorder la longueur d’onde de détection à celle du
laser DFBFL. Les variations de longueur d’onde à la sortie
du réseau de Bragg dues aux variations de pression sont
converties en variation d’intensité qu’on pourra détecter
au moyen d’un montage optoélectronique (photodiode,
amplificateur transimpédance, analyseur FFT) [6].
D. Rapport signal sur bruit
L’objectif de notre démarche est d’améliorer rapport
signal à bruit qui est le rapport de la variance du signal
acoustique détecté sur la variance du bruit total.
Ici on va se contenter de rappeler les principaux résultats
déjà présenté [6] :
222
2
DSSOfréqRIN
sigac
FVVV
V
N
S
(5)
Vsigac : Tension efficace due au signal acoustique détectée.
sigacAMOMFPphsigac PSSTGSIV 0
(6)
Psigac : La valeur efficace du signal acoustique.
G (V/I) : Gain de l’amplificateur transimpédance.
Sph (A/W) : Sensibilité de la photodiode.
I0 : La puissance moyenne générée par le laser autour de
la longueur d’onde.
TFP : Transmittance du Fabry-Perot.
Tcir : Transmittance du circulateur (Tcir=1).

δVDSSO : Tension de bruit efficace détectée due aux
fluctuations de pression générées par la mer [7]
DSSOFPAOphDSSO PTSSGIV ....
0
(7)
δVfréq : Tension de bruit efficace détectée due aux
fluctuations de fréquence du laser DFBFL.
fréqeffFPcirphfréq Ln
c
TTGSIV ]
2
[0
(8)
δVRIN : Tension de bruit efficace détectée due aux
fluctuations d’intensité du laser DFBFL.
0
... IRINTSGV cirPhRIN
(9)
En devisant par (SphGTcirTFPI0) on ramène le rapport signal
sur bruit à l’entrée en fonction des variations de pressions
acoustiques Psigac équivalentes dues au bruit du laser dans
la bande de détection 10KHz [5] :
222
22
2
2
.
)()(
AOAM
fréqeff
DSSO
sigac
FSFRIN
S
Ln
P
P
N
S
(10)
FP
P
N
S
eq
sigac
F2
2
(11)
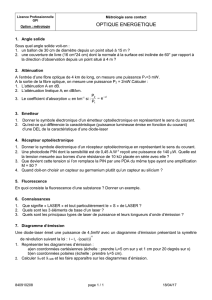
Nous avons montrer dans un travail récent [5]que la
pression équivalente au bruit intrinsèque au capteur est
calculée quand le rapport signal à bruit égale à 1.Pour que
la pression équivalente au bruit intrinsèque au capteur
soit minimale et tend vers la valeur efficace des
fluctuations δPDSSO due à la contribution globale du bruit
de mer sur toute la bande de détection ΔF, la sensibilité
acousto-optique doit être supérieur ou égale à
5.10-7nm/Pa (FIG4)
Figure 4-Pression équivalente de bruit normalisée en
fonction de la sensibilité acousto-optique
3. Optimisation de la sensibilité acousto-mécanique
Nous venons de voir que : SAO=SOM. SAM≥5.10-7nm/Pa
D’autre part compte tenu des choix technologiques faits
sur le réseau de Bragg, nous avons choisi et montré que
SOM=0,78( B/L)=2,43.10-5 (sd), ce qui nous impose une
valeur SAM=2.10-2nm/Pa.
La sensibilité acousto-mécanique peut être optimisée
en choisissant l’épaisseur de la membrane et le rayon
interne du capteur dans le modèle acousto-mécanique que
nous avons développé.
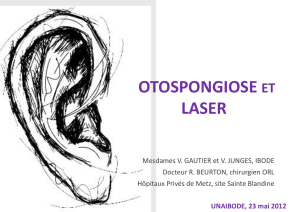
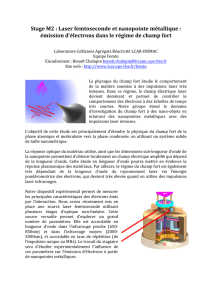
Dans notre cas nous avons modélisé la sensibilité
acousto-mécanique en utilisant un logiciel de calcul aux
éléments finis « COMSOL » qui nous a permis de définir un
maillage et de calculer les contraintes présentées sur la
figure 5.
Figure5 – modélisation de la sensibilité acousto-
mécanique
Pour une membrane de 3mm d’épaisseur et un rayon
interne de 2cm le résultat de la modélisation nous donne :
SAM=1 ,94.10-2nm/Pa
Ainsi nous avons montré que la sensibilité acousto-optique
du capteur requise peut être atteinte
(SAO=SAM.SOM>5.10-7nm/Pa).Ceci nous permet maintenant
d’envisager la réalisation d’un capteur capable de détecter
le bruit de mer et tous les signaux acoustiques du même
ordre de grandeur.

Figure 6 sensibilité acousto-mécanique en fonction de
l’épaisseur de la membrane
Sur la figure 6 nous avons montre l’évolution de la
sensibilité acousto-mécanique en fonction de différente
épaisseur de membrane pour un rayon interne Ri=2cm,
nous voyons qu’il est possible d’améliorer cette sensibilité
en jouant sur l’épaisseur e.
CONCLUSION
Grace aux mesures, à la modélisation du bruit optique
du capteur et en prenant en compte le bruit de mer, nous
avons déterminé la sensibilité nécessaire pour atteindre le
niveau minimum de signal acoustique du même ordre de
grandeur que le bruit de mer. Enfin la modélisation
acousto-mécanique nous a permis de montrer que nous
pouvons atteindre la sensibilité souhaitée 2.10-2nm/Pa et
donc la sensibilité acousto optique de 5.10-7nm/Pa. Grace
à ce résultat et au fait que le bruit du laser ne soit pas trop
élevé, il sera possible d’atteindre des pressions
équivalentes qui soient inférieures ou égales aux
fluctuations de pression dues au bruit de mer sur toute la
bande de mesure de 1Hz à 10KHz
0,01
0,1
1
10
100 10000
S(nm/Pa)
e(µm)
REFERENCES
[1] J P F Wooder,B Hooder and R I Crickmore.“ Acoustic
properties of a fiber-laser microphone”, Meas.Sci.Technol.
18884 (2007)
[2] B.Orsal, R.Vacher, D.Dureisseix.”Bruit optique d’un laser
à fibre utilisé à 1550nm comme capteurs d’ondes
acoustiques en milieu sous- marin», OCS 08,Mars 17-
20,2008.
[3] Lars voxen Hansen,Fredik Kullander. “Modelling of
hydrophone based on a DFB fiber laser
[4] D.J.Hill, P.J.Nash, D.A.Jackson, D.J.Webb, S.F.O Neill,
I.Bennion, andL. Zhang “A fiber laser hydrophone array”
[5]B.Orsal,S.Ouaret,R.Vacher,D.Dureisseix.”Noise
equivalent pressure of a 1550nm fiber laser as an
underwater acoustic sensor dedicated to high depth.
[6]T.Souici,B.Orsal,R.Vacher,B.Wattrisse”Salon international
des énergies renouvelables et des applications
« ENARGAIA »,(2011)
[7]Wenz,G.M 1962.Acoustic ambient noise in the ocean :
Spectra and sources. Journal of the Acoustical Society of
America,34,1936-1956.

1
/
5
100%