15-TP3-Lentilles I 2008-2009

Optique TP3 1
Lentilles I
1- BUT DE LA MANIPULATION
La manipulation consiste à déterminer, par différentes méthodes, la distance focale
f
′
d'une lentille
mince convergente
(on admettra que la lentille est utilisée dans les conditions de Gauss).
2- MANIPULATION
2-1 Matériel
Le matériel utilisé comprend :
-1 banc d’optique -1 écran percé de trous représentant une flèche
-1 source lumineuse -1 écran mobile pour la visualisation des images réelles
-1 dessin sur papier calque -1 lentille convergente L de distance focale inconnue
-1 miroir plan
2-2 Détermination de la distance focale d’une lentille mince convergente
La distance focale image
f
′
de la lentille L sera déterminée par
trois méthodes
dont on comparera les
précisions.
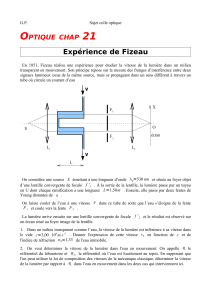
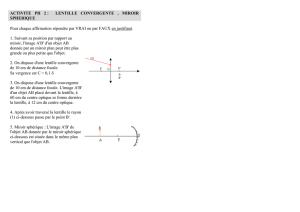
2-2-1 Méthode d’autocollimation
On utilise le fait qu’un système optique constitué d’une lentille convergente accolée à un miroir plan
donne, d’un point objet A de l’axe, une image A’ qui lui est superposée si A
coïncide
avec le foyer
principal objet F de la lentille.
♦
Effectuer plusieurs mesures de
f
′
et compléter le tableau ci-dessous.
f ’
(cm)
♦
En déduire la valeur de f ’ et estimer l’incertitude
∆
f ’ :
ff
′
∆
±
′
=
miroir plan
♦ Vérifier cette propriété en poursuivant la
marche des rayons lumineux de la figure 1
ci-contre.
♦ Utiliser cette méthode pour déterminer la
distance focale image
f
′
de la lentille L
(prendre comme objet le dessin sur papier
calque ou l’écran métallique percé de
trous).
Fig 1: Autocollimation
lentille L
A
F O

Optique TP3 2
Remarque : Le dispositif «source lumineuse au foyer objet d’une lentille» constitue un collimateur
qui permet d’obtenir un faisceau de rayons parallèles à partir d’une source lumineuse ponctuelle. Il
est utilisé, par exemple, dans le spectroscope de la manipulation N°1.
2-2-2 Méthode utilisant la relation de conjugaison des lentilles minces
♦ Placer l’objet (le dessin sur papier calque ou la flèche) à une extrémité du banc d’optique et noter
sa position x
A
.
♦ Déterminer les positions x
A’
des images (réelles) de cet objet sur l’écran mobile, pour plusieurs
positions x
O
de la lentille.
♦ Compléter le tableau ci-dessous :
x
A
x
O
x
A’
1
OA
1
OA'
♦ Que se passe-t-il si l’objet est trop proche de la lentille ?
♦ Tracer la courbe y = 1/
'OA
en fonction de x = 1/
OA
.
♦ Déduire de cette courbe la distance focale
f
′
de la lentille et estimer ∆f ’ :
f
f
′
∆
±
′
=
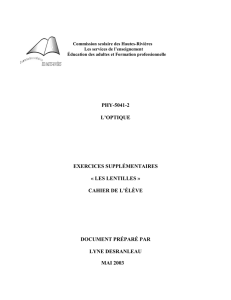
2-2-3 Méthode de Bessel
Cette méthode est fondée sur le fait qu’une lentille donne d’un objet AB une image nette sur un écran
situé à une distance D de cet objet, pour deux positions (notées x
1
et x
2
sur la figure 2). On posera :
l
= x
2
– x
1
.

Optique TP3 3
L’expression de la distance focale
f
′
de la lentille est alors donnée par la relation suivante :
'
f
=
D
4
D
22
l−
♦
Etablir cette relation (
on conseille de poser
OA
= -
x
et
'OA
=
D – x
dans la relation de
conjugaison des lentilles minces,
1/
AO ′
-
1/
OA
=
1/
OF'
, et d’en déduire l’écart x
2
– x
1
=
l
entre les racines x
1
et x
2
de l’équation du 2
ème
degré en x ainsi obtenues).
♦
Montrer que l’expression de l’incertitude absolue
∆
f
′
sur
f
′
peut s’écrire :
∆
f
′
=
l
l
l∆
+∆
+D2
D
D4
D
2
22
B
O
1
B
′
1
A
′
A
B
O 2
A
′
2
B
′
x
x
1
x
2
D
l
écran
objet
Fig 2: Il existe deux positions de la lentille pour lesquelles on obtient, sur l’écran, une image nette de l’objet AB.
lentille (position 2)
lentille (position 1)
A

Optique TP3 4
♦
Effectuer, en prenant D = 150,0 cm, plusieurs mesures de x
1
et de x
2
et compléter le tableau ci-
dessous :
x
1
(cm)
x
2
(cm)
♦
En déduire :
x
1
±
∆x
1
=
et x
2
±
∆x
2
=
♦
Calculer
l
±
∆
l
:
l
±
∆
l
=
♦
En déduire f ’
±
∆f ’, après avoir précisé la valeur de ∆D :
f ’
±
∆f ’=
♦
Comparer les trois méthodes utilisées ainsi que leurs précisions respectives.

Optique TP3 5
ANNEXE : notes de cours
1- NOTION D’OBJETS ET D’IMAGES
Un système optique (S) sépare l'espace en
deux
parties : le milieu
objet
situé avant la face d'entrée et
le milieu
image
situé après la face de sortie (fig 1).
•
La nature d’un objet dépend de sa position par rapport à la face d’
entrée
et celle de l’image de sa
position par rapport à la face de
sortie
.
•
Un objet est dit
réel
s’il est
situé
avant
la face
d’entrée et
virtuel
s’il est situé
après
cette face.
•
Une image est dite
réelle
si elle est située
après
la face de
sortie et
virtuelle
si elle est située
avant
cette face.
•
Un objet
réel
envoie un faisceau lumineux
divergent
sur la face d’entrée du système optique (fig
2).
•
Un objet virtuel
pour un système optique
(S)
est en fait, l’image
réelle
d’un objet donnée par un
autre système
(S
1
) et située
après
la face d’entrée du système (S). Le faisceau lumineux incident sur
le système (S)
converge
donc vers cette image (fig 3).
Fig 2 : Le point A est un objet réel pour le système (S).
A (S)
Fig 3: L’image réelle A, donnée par (S
1
) de l’objet A
1
, est un objet virtuel pour (S).
A
1
(S
1
) (S)
A
face d’entrée
milieu objet milieu image
(S)
face de sortie
sens de propagation
de la lumière
Fig 1 :
 6
7
8
9
6
7
8
9
1
/
9
100%