Fonctionnement des MOCN : Chapitre de manuel

3
Chapitre 1 : Fonctionnement des
MOCN
Ce chapitre a deux objectifs. D’une part de familiariser le lecteur au vocabulaire
conventionnellement utilisé à propos des machines outil à commande numéri-
que. D’autre part de lui apporter quelques éléments concernant les solutions
technologiques utilisées pour la réalisation de ces machines. Ces connaissances
sont indispensables pour savoir identifier “l’objet réel” et ses défauts de fonc-
tionnement qui seront l’objet d’une modélisation.

4
Définitions
1. DÉFINITIONS
1.1. M.O.C.N.
Les machines à commande numérique (MOCN) sont des machines partiellement ou totalement auto-
matisées. Les ordres de mouvement des différents organes sont donnés par programmation. En parti-
culier, les positions successives de l’outil par rapport à la pièce sont exprimées sous forme numérique.
Elles sont définies dans un système de coordonnées dont la nomenclature est normalisée (NF Z68-
020)
1.2. AXE
Un degré de liberté d’un organe de machine est appelé AXE si l’actionneur du mouvement est asservi
en vitesse et position, et s’il peut être synchronisé avec un autre degré de liberté pour obtenir un dé-
placement qui n’est pas parallèle à une direction principale du système de coordonnées.
Il permet d’obtenir une position, par une instruction numérique, à la résolution du moyen de mesure
près.
1.3. DEMI-AXE
Un degré de liberté d’un organe de machine est appelé DEMI-AXE si l’actionneur du mouvement est
asservi en vitesse et position, sans pouvoir être synchronisé avec un autre degré de liberté.
1.4. AXE SEQUENTIEL
Un degré de liberté d’un organe de machine est appelé AXE SEQUENTIEL si l’actionneur du mou-
vement n’est pas asservi en vitesse et position. Le nombre de positions obtenues de façon automatique
est très limité.
Exemples: déplacement d’une contre-pointe, plateau tournant indexé à quatre positions, broche in-
dexée tous les 15 degrés,...
Remarques:
• On emploie rarement le nom d’axe pour les organes tels que: mouvement d’un magasin d’outils,
tourelle, mandrin, palettiseur...
• L’asservissement de commande d’un axe ou demi-axe est souvent réalisée en boucle fermée, mais
on rencontre aussi des déplacements par moteur pas à pas avec une commande en boucle ouverte.
Une MOCN est un système automatisé dans lequel on peut dissocier les fonctions en partie commande
(PC) et partie opérative (PO).

5
STRUCTURE D’UNE MOCN
2. STRUCTURE D’UNE MOCN
2.1. Partie commande
Les fonctions de la PC sont assurées par des sous ensembles:
• le directeur de commande numérique (DCN),
• les interfaces avec la PO,
• les interfaces de communication avec l’utilisateur et les autres PC,
2.1.1. Directeur de commande
Le directeur de commande et l’automate programmable sont deux systèmes à base de microproces-
seurs.
Le directeur de commande a pour fonctions:
• le pilotage et la synchronisation des axes de mouvement,
• la gestion des programmes,
• le paramètrage des dimensions des outils, du porte-pièces, de la machine,
• la communication avec l’extérieur.
L’automate programmable est chargé de l’automatisation de la machine. Il échange des informations
avec le DCN, l’opérateur et la PO.
Les informations d’entrée sont:
• l’état des capteurs,
• l’état des préactionneurs
• les ordres de l’opérateur via les boutons du pupitre.
Les informations de sortie sont:
• la commande des préactionneurs,
• l’autorisation de fournir l’énergie aux préactionneurs,
• l’état des voyants du pupitre.
2.1.2. Les interfaces PC / PO
L’interface automate / PO est constituée de “cartes entrées-sorties”, elles transforment des informa-
tions binaires (dites aussi “tout ou rien”).
L’interface DCN / PO est constituée de “cartes d’axes” et de “variateurs de vitesse”.
Ces organes sont chargés de réaliser l’asservissement en vitesse et en position de chacun des mouve-
ments outil/pièce.
Pour chaque mouvement, la carte d’axe contrôle la position, et le variateur contrôle la vitesse.
La boucle d’asservissement en vitesse est un élément actif de la boucle de position. (voir shéma fig. 4)
La carte d’axe reçoit, d’une part une consigne de position que le DCN synchronise avec les autres
axes, et d’autre part, une image de la position réelle du mobile fournie par un capteur.
En fonction de la différence entre ces deux informations, que l’on appelle erreur de poursuite, elle
élabore la consigne de vitesse pour le variateur.
Le variateur doit fournir l’énergie nécessaire au moteur pour maintenir sa vitesse constante, quelque
soit le couple résistant.
Pour cela il compare la consigne reçue de la carte d’axe et l’image de la vitesse réelle du mobile, et
fait varier la tension d’alimentation du moteur en fonction de cette différence.

6
STRUCTURE D’UNE MOCN
2.2. Partie Opérative
2.2.1. Motorisation
Deux types d’actionneurs sont utilisés dans les axes numérisés:
Le premier a été le moteur à courant continu. Ses deux principales caractéristiques sont les suivantes:
• La fréquence de rotation du rotor est proportionnelle à la tension d’alimentation.
• Le courant consommé est proportionnel au couple résistant appliqué au rotor.
Pour réguler sa vitesse il faut donc faire varier la tension à ses bornes tout en maintenant une alimen-
tation en intensité suffisante pour fournir le couple mécanique nécessaire à l’entraînement du mobile.
Aujourd’hui on utilise aussi des moteurs à courant alternatif (moteur asynchrone) .
Pour faire varier sa vitesse on agit sur la fréquence du courant qui l’alimente.
2.2.2. Mesure de la vitesse
Les capteurs de vitesse utilisés sont généralement des génératrices-tachymétriques.
Ces dispositifs ont la propriété de fournir une tension électrique proportionnelle à la fréquence de ro-
tation de leur axe. Ils peuvent être intégrés au moteur à la construction.
Une autre solution consiste à calculer la dérivée de la mesure de position.
2.2.3. Mesure de la position
Les capteurs de position diffèrent par:
• Le type de mouvement mesuré:
linéaire ou rotatif.
• La nature de l’information délivrée:
Quand le déplacement du mobile entraine une variation continue d’une grandeur électrique (cap-
teurs résistifs) ou magnétique (capteurs inductifs, transformateurs variables), l’information est
dite “analogique” .
Les capteurs incrémentaux (générateur d’impulsion et compteur), ou les codeurs fournissent une
information “numérique”.
• La nature de la lecture (ou détection du mouvement):
La mesure est dite absolue pour un codeur, dans ce cas la position est définie par rapport à l’ori-
gine au moyen d’un code binaire (code GRAY).
Elle est dite relative pour capteur incrémental. Le déplacement est mesuré comme un agrandisse-
ment de la coordonnée par rapport à la position précédente.
On parle de mesure semi-absolue dans le cas d’un codeur rotatif qui effectue des mesures sur plu-
sieurs tours, ou pour un “resolver” qui ne permet une mesure absolue que sur un trés petit dépla-
cement. Il est alors nécessaire de complèter cette mesure par un comptage des tours.

7
Fonctionnement d’un axe
3. FONCTIONNEMENT D’UN AXE
3.1. Génération des consignes de position
L’interpolateur a pour rôle de générer les consignes de positions pour chacun des axes et de les syn-
chroniser. Ces informations sont calculées périodiquement à une cadence constante (dite fréquence
d’horloge) en fonction de la trajectoire à réaliser.
3.1.1. Exemple:
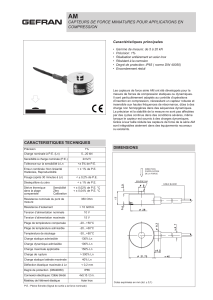
Dans le plan d’interpolation (X,Y), la trajectoire à réaliser est
l’arc de cercle de rayon R , d’angle A dans le sens horraire, de
centre C(Xc,Yc), au départ de P0(X0,Y0).
La vitesse d’avance est de Vf
• Calculer les coordonnées (x,y) du point courant P en fonction
du temps (à t = 0 : P = P0)
• Combien l’interpolateur générera-t-il de consignes (x,y) sa-
chant que la période d’horloge est de 10 ms. ?
Application numérique : R = 50 mm ; A = 2 π rd ; Vf = 100 mm/mn
3.1.2. Rampes d’accélération et de décélération
On désire une vitesse constante sur la plus grande partie possible de la trajectoire. Cela signifie que
les phases d’accélération et de décélération devront être les plus courtes possible. L’accélération
maximale (ou la durée du passage de la vitesse zéro à la vitesse maxi) sera ajustée en fonction des
performances de l’axe et de l’inertie mécanique à vaincre.
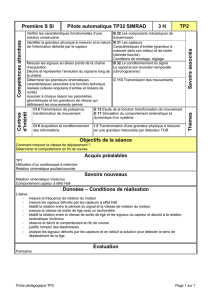
Les rampes de transition peuvent avoir différentes formes
+
+
+
P(t)
P0 Cx
y
Figure 2: Interpolation circulaire
t
V
t
dV
dt
-------
t
V
t
dV
dt
-------
t
V
t
dV
dt
-------
rampes linéaires rampes paraboliques rampes sinusoïdales
Figure 3: Rampes d’accélération
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%