Groupes électrogènes de secours

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5 180 - 1
Groupes électrogènes de secours
par
Bernard COLIN
Directeur Ingénierie à SDMO Groupes électrogènes
ans la société actuelle, toutes les activités, qu’elles soient professionnelles
ou privées, sont consommatrices d’énergie électrique. Toute interruption
ou perturbation dans la distribution de cette énergie entraîne des désordres qui
peuvent devenir insupportables par l’usager. L’importance de la continuité et de
la qualité de l’alimentation électrique est fonction de l’activité concernée. Cer-
taines applications exigent une permanence quasi complète de l’alimentation
car une absence met en péril la sécurité des personnes ou des biens. En tête de
ces consommateurs viennent bien évidemment l’activité hospitalière, les sites
recevant du public et les installations de protection contre l’incendie. Le législa-
teur s’est préoccupé de ce problème et tout site de cette nature doit être équipé
de moyens d’alimentation de secours en énergie électrique. D’autres consom-
mateurs, pour lesquels la fiabilité de l’alimentation électrique ne se mesure pas
en terme de risques humains, ne peuvent admettre toutefois de coupure car
celle-ci peut avoir des conséquences extrêmement préjudiciables sur le plan
économique. Les activités mettant en jeu des systèmes informatiques sont un
exemple évident de ce type d’exigence puisqu’elles ne peuvent admettre la
moindre coupure de quelque durée que ce soit.
1. Critères de définition............................................................................... D 5 180 - 3
1.1 Classes de puissance ................................................................................... — 3
1.2 Classes d’applications.................................................................................. — 3
1.3 Délais d’intervention .................................................................................... — 3
2. Dimensionnement d’un groupe électrogène..................................... — 5
2.1 Dimensionnement en fonction de l’impact de charge .............................. — 5
2.2 Alimentation de charges non linéaires....................................................... — 6
3. Régime du neutre...................................................................................... — 7
3.1 Régime du neutre en basse tension ........................................................... — 7
3.2 Régime du neutre en haute tension............................................................ — 7
4. Déclassement............................................................................................. — 10
5. Couplage des groupes électrogènes ................................................... — 10
5.1 Méthodes de couplage................................................................................. — 10
6. Le groupe électrogène et l’environnement ....................................... — 12
6.1 Émissions polluantes dans les gaz d’échappement.................................. — 12
6.2 Nuisances acoustiques ................................................................................ — 13
7. Schémas des circuits fluides................................................................. — 13
7.1 Circuits de refroidissement haute température (Hq)
et basse température (Bq)............................................................................ — 13
7.2 Circuit de lubrification.................................................................................. — 15
7.3 Circuit d’alimentation en combustible........................................................ — 15
7.4 Circuit de démarrage.................................................................................... — 16
8. Surveillance du groupe électrogène ................................................... — 16
9. Entretien d’un groupe électrogène...................................................... — 17
10. Conclusion.................................................................................................. — 17
Pour en savoir plus ........................................................................................... Doc. D 5 180
D

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
GROUPES ÉLECTROGÈNES DE SECOURS ____________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5 180 - 2© Techniques de l’Ingénieur, traité Génie électrique
Divers moyens de secours ont donc été envisagés et mis en œuvre ; le choix
de la source de remplacement utilisée est fonction de plusieurs critères :
— le temps de coupure maximal admissible,
— la nature de la charge à réalimenter,
— la puissance de la charge à secourir.
Plusieurs sources de remplacement peuvent être mentionnées.
■
La batterie à courant continu est rarement suffisante par elle-même car la
plupart des applications réclament une alimentation en courant alternatif. Elle
est toutefois utilisée en éclairage de secours par exemple.
■
L’onduleur permet d’obtenir à partir d’une source à courant continu, une ali-
mentation en courant alternatif. Cette solution est utilisée quand l’autonomie et
la puissance nécessaire sont relativement limitées (quelques kVA pendant
quelques minutes). Cette source de remplacement est généralement associée à
un autre moyen de secours (un groupe électrogène) permettant d’augmenter la
durée de l’autonomie.
■
Le groupe électrogène permet d’atteindre des puissances et des durées de
fonctionnement importantes.
Outre son application en source de remplacement, le groupe électrogène offre
des possibilités d’utilisation dans différents domaines.
■
Des groupes de base sont destinés à fournir la totalité de la puissance élec-
trique d’une zone non alimentée par un distributeur. Cette application se ren-
contre surtout dans les pays en voie de développement car elle permet d’éviter
des investissements lourds et peut se mettre en œuvre dans des délais très
courts.
■
Des groupes d’écrêtage sont destinés à fournir tout ou partie de la puissance
consommée sur un site pour limiter le montant de la prime fixe ou pour bénéfi-
cier de conditions tarifaires liées à cette fonction ; cette application est générale-
ment couplée à l’application groupe de secours qu’elle permet souvent de
rentabiliser ; ainsi de nombreux hypermarchés, qui doivent s’équiper de
groupes de secours, rentabilisent ceux-ci en faisant de l’écrêtage.
■
Des groupes de cogénération destinés, comme les groupes d’écrêtage, à
fournir tout ou partie de l’énergie électrique consommée sur un site ; toutefois
pour des moteurs fonctionnant au gaz, la fonction groupe de secours n’est pas
toujours acceptable car elle implique dans certains cas, comme l’alimentation
des hôpitaux, de disposer d’une énergie primaire stockable ce qui n’est pas le
cas du gaz.
Dans le présent exposé, nous ne traitons que les groupes électrogènes dans
les applications secours et production. L’application cogénération ne sera donc
pas évoquée.
Un groupe électrogène qui est une machine permettant de transformer en
électricité un combustible primaire comme le fioul ou le gaz est constitué de
deux composants principaux :
— un moteur thermique transformant l’énergie primaire en énergie méca-
nique ;
— un alternateur transformant l’énergie mécanique développée par le moteur
thermique en énergie électrique.
La puissance d’un groupe électrogène équipé d’un moteur Diesel va de moins
de 1 kVA à plusieurs MVA et la vitesse de rotation est également variable suivant
la puissance et l’application (tableau
1
).
Tableau 1 – Familles d’application des groupes électrogènes
Vitesse de rotation Type Puissances Applications
3 000 tr/min Rapide Faible Domestiques - Secours
900 ,
N
, 1 800 tr/min Rapide Moyenne , 5 000 kVA Production - Secours
350 ,
N
, 900 tr/min Semi-rapide Forte 4 ,
P
, 20 MVA Production - Secours
N
, 350 tr/min Lent Forte Production

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
____________________________________________________________________________________________________ GROUPES ÉLECTROGÈNES DE SECOURS
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5 180 - 3
1. Critères de définition
1.1 Classes de puissance
La puissance d’un groupe électrogène est définie comme la puis-
sance disponible aux bornes de l’alternateur, déduction faite de la
puissance électrique absorbée par les auxiliaires essentiels. Elle
s’exprime en kW, à la fréquence de définition et sous un facteur de
puissance de 0,8.
Les puissances du groupe électrogène doivent être définies en
accord avec les plans et les programmes d’entretien spécifiés par le
constructeur du moteur, de l’alternateur et de l’appareillage de cou-
pure et de commande.
À toutes les puissances garanties, il faut ajouter une puissance
additionnelle nécessaire aux besoins de la régulation (applications
brusques d’une charge). Cette puissance additionnelle, qui est en
général égale à 10 % de la puissance assignée du groupe, ne doit
pas être utilisée pour l’alimentation permanente de la charge.
Trois types de puissance sont définies :
—la puissance continue correspond à la puissance que le
groupe est capable de fournir en service continu, pendant un
nombre illimité d’heures par an, en respectant les arrêts normaux
pour maintenance et dans les conditions ambiantes définies ;
—la puissance principale correspond à la puissance maximale
disponible, sous charge variable, pendant un nombre illimité
d’heures par an, en respectant les arrêts normaux pour maintenance
et dans les conditions ambiantes définies. La puissance moyenne
admissible sur une période de 24 heures, ne doit pas être supérieure
à une fraction de la puissance principale. Cette puissance moyenne
P
, qui est définie par le constructeur du moteur Diesel, est calculée
comme suit :
avec
P
1,
P
2, ...
P
n
puissances pendant les temps
t
1,
t
2, ...,
t
n
Dans ce calcul, toute puissance inférieure à 30 % de la puissance
principale doit être remplacée par une puissance égale à 30 % de la
puissance principale et les temps d’arrêt ne doivent pas être
comptés ;
—la puissance pour utilisation limitée correspond à la puis-
sance maximale que peut fournir le groupe avec une durée annuelle
limitée à 500 h et une marche continue maximale de 300 h, en res-
pectant les arrêts normaux pour maintenance et dans les conditions
ambiantes définies. Bien entendu, le fonctionnement dans ces
conditions peut affecter la durée de vie du groupe.
1.2 Classes d’applications
Un groupe électrogène doit être défini en fonction des exigences
de la charge qu’il doit alimenter. Il existe quatre classes d’applica-
tions qui ont été définies pour répondre à ces diverses exigences.
■La classe G1 est définie pour l’alimentation de charges ne
nécessitant que des contraintes mineures en tension et en fré-
quence.
■La classe G2 est définie pour l’alimentation de charges nécessi-
tant des caractéristiques proches de celle du réseau public ; sur
application brutale de la charge, des fluctuations temporaires en
tension et en fréquence sont admises.
■La classe G3 est définie pour des exigences sévères en tension,
en fréquence et en forme d’onde.
■La classe G4 est définie pour des exigences en tension, en fré-
quence et en forme d’onde exceptionnellement sévères.
1.3 Délais d’intervention
Cette notion de délai d’intervention est prise en compte dans le
cas de groupes électrogènes destinés à fonctionner en secours de la
source normale d’alimentation.
Le temps admissible de coupure peut être plus ou moins long sui-
vant le site secouru.
Dans le cas d’un délai d’intervention non spécifié, la durée de la
coupure a peu d’importance et il est possible d’utiliser un groupe à
démarrage manuel. Le temps de reprise dépend du temps mis par
l’opérateur à intervenir et les montées en vitesse et en charge qui
sont liées à la température de l’huile du moteur, seront fonction de
la température ambiante.
Dans le cas d’un délai d’intervention à coupure spécifiée, la durée
maximale de la coupure est définie en fonction des impératifs du
site à réalimenter. Les temps de reprise se situent généralement
entre 8 et 15 secondes. Ce délai d’intervention est le plus couram-
ment rencontré notamment dans les hôpitaux, les immeubles de
grande hauteur, les bâtiments recevant du public.
Pour pouvoir répondre au délai d’intervention, le groupe doit être
préparé afin de démarrer dans toutes les conditions de température.
Si le groupe se trouve dans une ambiance froide, il ne peut
atteindre sa vitesse et prendre la charge dans les délais impartis que
s’il a été préchauffé. Cet équipement de préchauffage est toujours
prévu dans ce cas d’application. Certains constructeurs de moteurs
exigent également un système de prégraissage cyclique ou perma-
nent des parties tournantes du moteur pour autoriser un démarrage
sans source auxiliaire.
Il convient de noter que, dans le cas d’une installation de secours
assuré par la mise en parallèle de plusieurs groupes, il est néces-
saire d’ajouter au temps de démarrage des groupes la durée néces-
saire au couplage de
n
-1 groupes. Le temps de couplage d’un
groupe étant généralement de l’ordre de 15 à 20 s, le délai global de
mise à disposition des moyens de secours peut être très long et
incompatible avec les impératifs de sécurité du site secouru.
Pour faire face à cette difficulté, il est possible de mettre en œuvre
le procédé du couplage à l’arrêt qui consiste à fermer les disjonc-
teurs des groupes dès réception de l’ordre de démarrage en mainte-
nant hors service l’excitation des alternateurs jusqu’au passage de
tous les groupes à une vitesse très voisine de la vitesse nominale.
Cette disposition permet de disposer de l’ensemble des moyens
de production dans un délai comparable au délai de démarrage d’un
seul groupe. Elle présente en outre les avantages qui suivent.
■Dans le cas où les moyens de production sont surabondants par
rapport à la puissance appelée au moment de la perte de l’alimenta-
tion normale, elle permet d’assurer la reprise de la charge dans de
bonnes conditions ; les groupes en excès par rapport aux besoins
sont arrêtés par la mise en œuvre d’une gestion wattmétrique qui
assure l’adéquation de la puissance tournante à la puissance appe-
lée.
Exemple : éclairage et charges électriques simples.
PP
1
t
1
P
2
t
2...
P
n
t
n
+++
t
1
t
2...
t
n
+++
----------------------------------------------------------=
Exemple : éclairage, pompes, ventilateurs.
Exemple : charges régulées par thyristors, télécommunications.
L’alimentation de ce type de charges peut nécessiter des études parti-
culières en raison de leur influence sur la forme d’onde de tension de
l’alternateur (§ 3.2).
Exemple : systèmes informatiques.

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
GROUPES ÉLECTROGÈNES DE SECOURS ____________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5 180 - 4© Techniques de l’Ingénieur, traité Génie électrique
■Dans le cas d’une installation secourue en haute tension, la pro-
cédure de couplage à l’arrêt permet d’assurer la magnétisation pro-
gressive de la boucle HTA et de transformateurs qu’il ne serait pas
possible de réaliser sans mise en œuvre de séquences de délestage
préjudiciables au délai global de reprise en secours.
L’application de la charge au groupe électrogène doit être
conduite dans des conditions de tension et de fréquence accepta-
bles par le site.
Le temps de reprise d’une charge est fonction :
— de la valeur relative de cette charge par rapport à la puissance
nominale du groupe ;
— de l’inertie des masses tournantes (moteur, alternateur, accou-
plement) ;
— de la régulation ;
— du système d’alimentation en air comburant.
Les deux premiers points sont évidents et les problèmes liés au
dimensionnement d’un groupe en fonction de l’impact de charge
appliqué sont traités au paragraphe 3.1.
Toutefois, il convient de noter que des critères de tension et de
fréquence ainsi que les capacités du groupe à reprendre des impacts
de charge imposent fréquemment la mise en œuvre de procédures
de délestage/relestages automatiques pouvant conduire à des étu-
des particulières de distribution électrique en fonction des circuits
d’utilisation prioritaires.
Les deux points concernant la régulation et le type de diesel se
doivent d’être expliqués plus précisément.
■La régulation de vitesse est destinée à maintenir le groupe à sa
vitesse nominale pour fournir une fréquence constante. Les régula-
teurs peuvent être de plusieurs types suivant l’application
concernée :
— dans un régulateur proportionnel, une variation de vitesse liée
à la charge entraîne une variation proportionnelle du signal de
commande ;
— dans un régulateur proportionnel intégral, une variation de
vitesse liée à la charge entraîne une modification proportionnelle du
signal de commande et, de plus, une correction intégrale de la
vitesse.
Un régulateur proportionnel intégral dérivé est un régulateur pro-
portionnel intégral qui corrige le signal de commande proportion-
nellement à la variation de la vitesse.
Un groupe électrogène peut fonctionner suivant deux modes de
régulation définissant la chute de vitesse entre un fonctionnement à
vide et un fonctionnement à pleine charge.
■Il y a fonctionnement isochrone lorsque la vitesse et donc la fré-
quence restent constantes quelle que soit la charge, en dehors des
variations transitoires dues aux variations brutales de cette charge.
Cette disposition est surtout applicable dans le cas d’un groupe
fonctionnant en solo. Dans le cas de groupes fonctionnant en paral-
lèle, il est nécessaire de prévoir un dispositif de répartition de puis-
sance assurant un équilibrage des puissances relatives entre les
groupes.
■Il y a fonctionnement avec statisme lorsque l’on impose une
baisse de vitesse entre le fonctionnement à vide et le fonctionne-
ment en charge. Elle permet d’assurer un fonctionnement stable de
plusieurs groupes couplés en parallèle.
Pour assurer une fréquence constante, il est nécessaire de prévoir
un dispositif de centrage de fréquence. Le statisme est défini par
rapport à la vitesse nominale et calculé par :
formule dans laquelle
N
0 et
N
représentent respectivement la
vitesse à vide et la vitesse à pleine charge.
Ce statisme a une valeur comprise entre 3 et 5 %.
■Le type de Diesel dépend du mode d’
alimentation en air
comburant
. En effet, la puissance maximale que peut fournir un
moteur Diesel est fonction de la masse de combustible injectée dans
le cylindre et donc de la masse d’air nécessaire pour brûler ce
combustible. En conséquence, il est possible de définir deux catégo-
ries de moteurs Diesel.
Le moteur à aspiration naturelle où aucun artifice n’est utilisé
pour augmenter la quantité d’air emmagasiné dans les cylindres
permet de reprendre instantanément une puissance égale à sa puis-
sance nominale.
Le moteur suralimenté est tel que la quantité d’air comburant est
augmentée par l’utilisation d’un turbocompresseur de suralimenta-
tion entraîné par les gaz d’échappement du moteur. Pour améliorer
encore ce système, certains moteurs sont équipés d’un système de
refroidissement de l’air ; ces procédés permettent d’obtenir des aug-
mentations de puissance considérables puisqu’avec une même
cylindrée, il est possible d’atteindre des puissances trois fois supé-
rieures à la puissance d’un moteur non suralimenté avec des aug-
mentations de masse et de volume de l’ordre de 10 %.
Dans ce cas, les échelons de puissance applicables instantané-
ment au moteur sont fonction de la pme (pression moyenne effec-
tive) qui est la pression moyenne du cycle de travail et qui se calcule
comme suit :
avec
K
= 1 222,8 pour un moteur à 4 temps et 611,4 pour un
moteur à 2 temps,
P
(kW) puissance par cylindre,
N
(tr/min) vitesse de rotation,
C
(L/cylindre) cylindrée
Pour un moteur non suralimenté, pme est de l’ordre de 7 bar et,
pour un moteur suralimenté avec refroidissement de l’air, pme
dépasse à présent 22 bar.
La suralimentation en air d’un moteur Diesel est quantifiée par
son taux de suralimentation défini par :
Un moteur suralimenté ne permet pas toutefois de reprendre
d’un seul coup sa puissance nominale. En effet, pour obtenir la puis-
sance, il faut que le turbocompresseur de suralimentation fournisse
l’air nécessaire pour assurer une parfaite combustion du combus-
tible injecté dont la quantité peut varier rapidement et de façon
importante en fonction de la consigne du régulateur de vitesse. Le
temps de montée en vitesse du turbocompresseur et donc le temps
de mise à disposition de l’air comburant, dépendent de la puissance
disponible dans les gaz d’échappement et de l’inertie du turbocom-
presseur.
En règle générale, un groupe suralimenté est capable de fournir
brutalement une puissance correspondant à 60 % de sa puissance
assignée avec une chute de vitesse transitoire de l’ordre de 10 à
12 % de sa vitesse nominale.
■De ce fait, pour assurer la réalimentation d’un site à partir d’un
groupe électrogène de secours, il convient toujours de vérifier que
les conditions de relestage de la charge sont compatibles avec les
capacités du moteur en conservant les critères définis de tension et
fréquence.
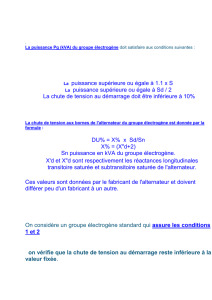
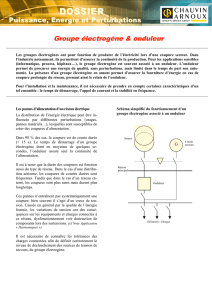
■Un groupe sans coupure dont l’utilisateur ne peut tolérer aucune
coupure est un groupe dont l’alternateur tourne en permanence
comme moteur synchrone en garantissant une alimentation com-
plètement ininterrompue dans l’éventualité d’une défaillance de la
source normale d’alimentation (l’alternateur est alors appelé aussi
ondulateur tournant). Un accumulateur d’énergie potentielle qui
peut être d’origine électrique (batteries) ou mécanique (volant
d’inertie) est utilisé pour assurer la puissance pendant une courte
période dans le but de permettre le démarrage du moteur Diesel,
son accouplement à l’alternateur par l’intermédiaire d’un
statisme 100
N
0
N
Ð()
N
0
¤=
pme
KP NC
¤=
Taux de suralimentation pme 8 1Ф=

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
____________________________________________________________________________________________________ GROUPES ÉLECTROGÈNES DE SECOURS
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5 180 - 5
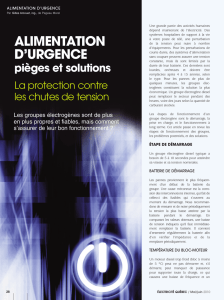
embrayage électromagnétique et sa prise de puissance. Comme
l’alimentation est transférée d’une source d’énergie à une autre, il
peut se produire une fluctuation transitoire des paramètres tension
et fréquence (figures 1 et 2).
2. Dimensionnement
d’un groupe électrogène
Un des problèmes le plus fréquemment rencontré dans la défini-
tion d’un groupe électrogène réside dans le dimensionnement opti-
mal du groupe en fonction de l’impact de charge qu’il est appelé à
assurer. De plus en plus, il est également nécessaire de définir le
groupe et en particulier l’alternateur en fonction de la nature de la
charge (charges non linéaires).
Nous allons étudier ci-après ces deux aspects en donnant des
méthodes de calcul simples permettant de dimensionner de façon
appropriée le groupe électrogène.
2.1 Dimensionnement en fonction
de l’impact de charge
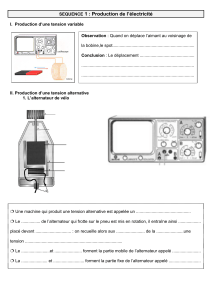
La méthode présentée ici est une méthode par itération permet-
tant d’obtenir la valeur de la tension à l’établissement d’une charge,
le temps de rétablissement de cette tension et la valeur de la fré-
quence à l’impact de charge (figure 3).
Le cas le plus couramment rencontré étant celui du démarrage
d’un moteur asynchrone, nous allons nous baser sur ce cas pour
expliquer la méthode utilisée.
Lorsqu’un moteur démarre, le courant appelé est toujours très
important mais l’appel de courant varie suivant le procédé mis en
œuvre pour assurer ce démarrage.
En démarrage direct, le rapport du courant de démarrage
I
d au
courant nominal
I
n est de l’ordre de 6 à 7 et le facteur de puissance
cos de l’ordre de 0,3.
D’autres procédés de démarrage sont possibles ; il convient de les
analyser au cas par cas suivant des critères économiques car ils
entraînent des surcoûts, citons :
— le démarrage sur autotransformateur ;
— le démarrage en étoile/triangle ;
— le démarrage sur résistance rotorique ;
— le démarrage sur résistance statorique ;
— le démarrage sur démarreur électronique.
Figure 1 – Résultats lors d’une panne réseau à pleine charge
Figure 2 – Groupe à temps zéro avec énergie fournie
par des batteries
1 500 tr/min 1 500 tr/min
Accumulateur
d'énergie
MOTEUR DIESEL
ALTERNATEUR
Accouplement
Groupe à « temps zéro » avec accumulateur d'énergie cinétique tournant.
Tension
U
Fréquence
f
Puissance relative
Perte du réseau
425
375
51
49
100 %
400 V
50 Hz
0,2 s
By Pass
Batteries
Interrupteur statique
Mutateur
Redresseur
Accouplement
Distribution de secours
Distribution haute qualité
Onduleur
tournant
Réseau
Diesel
Figure 3 – Évolution de la fréquence et de la tension sur impact
de charge et sur délestage
f
50 Hz
D
f
= 6 %
400 V
D
U
= 17 %
Charge 50 %
Charge 0 %
Charge relative
t
0
t
0+ 3s
t
U
f
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%