Alan Turing, en bref… - Le site de Marc SIBERT

Intelligence Artificielle
Intelligence Artificielle
R
Ré
éf
fé
érences du cours
rences du cours
• "Artifical Intelligence, a modern approach", S. Russel, P.
Norvig, Prentice Hall.
• "Artificial Intelligence", third edition, P.H. Winston, Addison
Wesley
• "Foundations of Constraint Satisfaction", E. Tsang, Academic
Press
Repr
Repré
ésentation des connaissances
sentation des connaissances
Intelligence Artificielle :
Intelligence Artificielle :
des tentatives de d
des tentatives de dé
éfinitions
finitions
Définitions
Discipline de l'informatique dont le but est
de construire des programmes «
intelligents
»
Mais aussi :
« C’est la science qui consiste à faire faire aux machines ce que l’homme ferait
moyennant une certaine intelligence », Marvin Minsky, MIT.
« Tout problème pour lequel il n’existe pas d’algorithmes connu ou raisonnable
permettant de le résoudre relève a priori de l’IA »
…
Le test de Turing (1950)...
Contourner le problème de la comparaison
Capacité à simuler des performances équivalentes à celles d’humains
dans des tâches cognitives (jeu de l’imitation).
« Je crois que, dans une cinquantaine d’années, il sera possible de programmer des
ordinateurs [...] pour les faire si bien jouer au jeu de l’imitation qu’un
interrogateur moyen n’aura pas plus de 70% de chances de procéder à
l’identification exacte au bout de cinq minutes de questionnement », Turing, 1950
Le test de Turing
Le test de Turing
Le test a été maintes fois reformulé en 50 ans... Aujourd’hui :
Un humain qui interroge un ordinateur à travers un télétype (pas
d'interaction entre l'humain et l'ordinateur), et l'humain ne peut pas
distinguer si son interlocuteur est un humain ou un ordinateur.
Requiert des capacités en
• représentation complexe des connaissances
• compréhension langage naturel
• raisonnement automatique
• apprentissage
Alan Turing, en bref
Alan Turing, en bref…
…
• Grand Informaticien, Mathématicien, Physicien, Philosophe,
(et d’autres)… anglais (1912-1954)
• Son implication dans la seconde guerre mondiale et la réussite
de sa machine « bombe » pour casser les codes allemands l’a
définitivement motivé pour se lancer dans la quête de
machines intelligentes...
Intelligence Artificielle :
Intelligence Artificielle :
un bref panorama (
un bref panorama (suite
suite)
)
S'appuie sur des disciplines telles que
• la philosophie
• la psychologie et les neuro-sciences (modèles cognitifs)
• les mathématiques :
logique (incomplétude de Goedel) :
un système formel est –il complet – correct ?
complexité : une classe de problèmes est dite intractable si le
temps pour résoudre des instances de cette classe de problème
augmente au moins exponentiellement avec la taille de ces instances;
• linguistique
Souvent fortement liée à d’autres disciplines informatique
• Recherche Opérationnelle
•Graphes
• Complexité (problèmes NP et au dessus…)
•…
Intelligence
Intelligence Artificielle
Artificielle
Terme créé en 1950-56 par Mc Carthy
•Les débuts (1950 – 1970) :
– méthodes générales de recherche
(méthodes
faibles
) : GPS (General Problem
Solving) par Newell et Simon, CMU,
– Lisp (Mac Carthy) (langage de haut niveau)
– Programme qui joue aux dames (Samuel)
– Représentation des connaissances : logique (représentation
explicite du monde + processus déductif)
– Recherche en traitement naturel de la langue (projets de
traduction automatique) fondé sur la syntaxe.
• Mais.... un gros problème de complexité et… les premières
déceptions…

Intelligence Artificielle
Intelligence Artificielle
•Seconde période (1969 – 1979)
– Domaines de compétence plus restreint et utilisation plus
grande de connaissances du domaine.
– Les systèmes experts
– En linguistique : langages plus restreints, la notion de
sémantique émerge (organisation de la mémoire, définition et
reconnaissance de situations prototypiques, …)
– En représentation des connaissances, langages de frames
beaucoup plus structurés que la logique
– Prolog, projet de 5ème génération
• Mais, les résultats n'atteignent pas les promesses des
années 70...
• Le retour des approches sub-symboliques (réseaux
neuronaux).
Intelligence Artificielle
Intelligence Artificielle
•Depuis 1987
– des techniques de recherche efficaces résolvent des problèmes
combinatoires (voir notamment SAT et la résolution de
contraintes)
– le champion du monde d'échecs battu par un programme
– des interfaces en langage naturel sont opérationnelles
– des systèmes experts temps réel
• Des méthodes numériques : Modèles de Markov cachés,
raisonnement probabiliste et manipulation de données incertaines
(réseaux bayésiens)
• De nouveaux défis avec l’augmentation des données disponibles
sous forme électronique (Web) : indexation/classification de
documents, recherche d’information, extraction de connaissances dans
les bases de données,recherche d’informations dans des « peers », …
On trouve de
On trouve de l
l’
’IA
IA un peu partout...
un peu partout... Le plan du cours
Le plan du cours
Résolution de problèmes
– Etat, opérateur, espace des états
– Recherche non informée, heuristique, recherche informée
Satisfaction de contraintes et SAT
– Etat, contraintes, problème de satisfaction de contraintes
– Techniques de cohérence par noeud, par arc
– Techniques avancées Forward Checking, backjumping,...
–SAT
Raisonnement, déduction, systèmes experts
– Représentation des connaissances, faits, règles
– Recherche dans un arbre ET/OU, chaînage avant, chaînage
arrière
Pourquoi
Pourquoi l
l’
’IA
IA peut souvent
peut souvent
se r
se ré
ésumer
sumer à
àde la recherche ?
de la recherche ?
• À l’origine la plupart des problèmes d’IA étaient liés à
– Résolution de puzzles, (Taquin, Rubik’s Cube, 8-Reines, …)
– Démonstration de théorèmes (logique, arithmétique,
géométrie, …)
– Jeux (Dames, Echecs, GO,…)
–…
Exemple : le jeu du taquin
Exemple : le jeu du taquin
Les opérateurs de changements d’état :
• Faire bouger une tuile à droite, à gauche, en haut,
en bas (si la case adjacente dans cette direction
est vide)
• Faire bouger la case vide à droite, à gauche, en
haut en bas (si on reste dans les limites du
damier)
1
23
4
5
6
7
8
État initial État final 123
4
567
8

M
Mé
éthodes de recherches...
thodes de recherches...
I
F
Etat Initial
Etat Final
M
Mé
éthodes de recherches...
thodes de recherches...
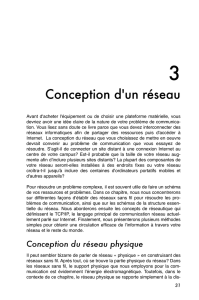
R
Ré
ésolution de probl
solution de problè
èmes
mes
Le problème à résoudre peut se formaliser comme
•Un but
• Un état initial
• Un ensemble d'opérateurs permettant de passer d'un état à
un autre
Un état initial + un ensemble d'opérateurs permettent de définir
un espace de recherche.
Résoudre un problème : trouver un chemin entre l'état initial et
l'état final.
En général, on associe également une fonction de coût à chaque
opérateur. Il faut donc dans ce cas trouver le meilleur chemin
(le moins coûteux).
Exemple :
•Les jeux
• Problèmes de routage
• ...
Espace des
Espace des é
états : le taquin
tats : le taquin
567 48 321
568 47 312
568 47 123
568 17 324
567 481 32
567 481 32
561 48 327
567 48 321
• Chaque configuration possible du taquin est un état
– 9 cases, 9! Possibilités (362880)
• L’ensemble des états crée l’espace des états dans
lequel la recherche de l’état but aura lieue
•Note:
certains états ne sont pas atteignables depuis l’état
initial (la moitié sur l’exemple du taquin).
... ... ...
... ... ...
Espace des
Espace des é
états pour le taquin
tats pour le taquin
1
23
4
5
6
7
8
1
23
4
567
8
1
23
4
5
6
7
8
1
23
4
5
6
7
8
1
23
4
567
8
1
23
4
567
8 1
23
4
567
8
1
23
4
5
6
7
8
1
23
4
5
6
7
8
noeud : état
arc : application d'un
opérateur
[étiquette des arcs: coût de
l'application d'un
opérateur]
caractéristiques de l'arbre
de recherche :
• facteur de branchement
• profondeur
Une solution pour le
Une solution pour le pb
pb du taquin
du taquin
1
23
4
5
6
7
8
1
23
4
567
8
1
23
4
567
8
1
23
4
567
8
12 3
4
567
8
123
4
567
8

Importance de la mod
Importance de la modé
élisation
lisation
• Intelligence humaine cachée dans la modélisation…
L’efficacité des méthodes générales dépend de cette
partie « cachée » de l’IA classique
• Exemple : labyrinthe dans les jeux 3D contemporains
?
Evaluation
Evaluation d'une m
d'une mé
éthode
thode
de r
de ré
ésolution de probl
solution de problè
ème
me
Comment mesurer la performance d'une méthode de
résolution de problèmes ?
• trouve-t-elle une solution / toutes les solutions/ une
bonne solution / la meilleure des solutions?
• quel est le coût de la recherche (temps/mémoire
requis pour trouver la solution) ?
Construction de l'arbre de recherche
Construction de l'arbre de recherche
Recherche-solution(problème,stratégie)
%problème= (Etat-initial,Etat-but,Opérateurs ). Retourne un chemin
solution ou échec
OUVERT ←{Etat-initial};
Tant que OUVERT ≠∅
Etat-courant ←tete(OUVERT)
si Etat-courant = Etat-but alors return(chemin(Etat-initial,Etat-
courant))
sinon
NEtats←développer(Etat-courant,opérateurs,stratégie)
OUVERT ←mise-à-jour( OUVERT, NEtats,stratégie)
Fin tant que
return(échec).
OUVERT = frontière de l’espace de recherche
Strat
Straté
égies de recherche
gies de recherche
Régissent l' ordre dans lequel lesnoeudsde l'arbre de recherche
vont être développés.
Types de stratégies :
• non informée, aveugle: purement syntaxiques
• heuristique: exploitation d'information sur le problème à
résoudre
Propriétés d'une stratégie :
•Complétude
• Complexité en temps / espace
• Admissibilité
Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G
Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G

Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G
Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G
Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G
Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G
Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G
Un exemple simple
Un exemple simple
Problème de routage
ABC
DEF
G
S
3
4
4
2
4
4
55
3
Point de départ: S
Point d'arrivée : G
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%