instructions assembleur -"dans un" -supplémentaires

March 2003
Phys. Chem. News 10 (2003) 39-45 PCN
39
CONCEPTION ET RÉALISATION D’UNE ALIMENTATION
STATIQUE ININTERRUPTIBLE COMMANDÉE PAR MICROCONTRÔLEUR
POUR ÉQUIPEMENTS MÉDICAUX HAUTEMENT SENSIBLES
K. Faitah*, A. Achachi
Laboratoire de Génie Electrique (L.G.E), Département de Physique, Faculté des Sciences,
Université Ibn Tofail, B.P.:133. 14000, Kénitra, Maroc
* Corresponding author. E-mail : faitah.khalid@caramail.com
Received : 04 February 2002; revised version accepted : 23 August 2002
Abstract
The purpose of this work is to conceive and realize a supply controled by microcontrolor for medical’s
equipments with high faithfulness in order to detect any cut or micro-cut of the sector’s current electric,
to fight against any voltage’s variation or frequency’s variation, and replace the sector (220 V - 50 Hz)
when a cut-out electric produces. A digital control system, piloted by the microcontrolor, is realized for
supervising any time all disturbance of medical’s equipements.
Keywords : Microcontrolor; Modulation SWM; Supply; Digital control.
Résumé
L’objectif de ce travail est de concevoir et réaliser une alimentation microcontrôlée, destinée aux
équipements médicaux à haute fidélité, tels les équipements de dialyse, de contrôle électrocardiogramme,
scanner..., en vue d’assurer par exemple l’éclairage et la réspiration artificielle lors d’une opération
chirurgicale, de détecter toute coupure ou micro-coupure du courant du secteur, de lutter contre les
variations de tension et les variations de fréquence et prendre, d’une part la relève en cas de coupure
totale du courant du secteur et d’alimenter d’autre part l’équipement médical.
Une commande numérique à base de microcontrôleur est élaborée pour surveiller en permanence toute
perturbation électrique à l’entrée de l’équipement.
Mots clés : Microcontrôleur ; Modulation MLI ; Alimentation ; Contrôle numérique.
1. Introduction
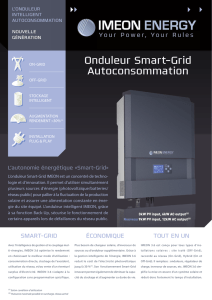
L’alimentation statique ininterruptible, comme
l’illustre la figure 1, est une interface placée entre
le réseau (secteur électrique) et l’équipement
médical. Elle est destinée à corriger les
surtensions, le bruit ou la baisse de tension. De
plus elle offre une source d’alimentation
secondaire qui remplace, sans microcoupure, la
source primaire lorsque celle-ci est déficiente.
Nous avons élaboré un programme écrit en
assembleur et exécuté par un micocontrôleur afin
de générer :
• Deux signaux MLI (modulés en largeurs
d’impulsions) et déphasés à la mi-periode du
secteur, permettant de fournir une tension
pratiquement stable de valeur efficace 220V et de
fréquence 50Hz.
• Un train d’impulsions modulées en position,
surveillant l’énergie emmagasinée dans la batterie
d’accumulateurs utilisée lors de la présence du
secteur et celle dissipée lorsque le secteur est
coupé, ce qui contribue à l’élévation de
l’autonomie de l’alimentation.
secteur
220V - 50Hz
L’équipement
médical
- Batterie
- Chargeur
Onduleur
~/-
Microcontrôleur
Figure 1 : Schéma synoptique de l’alimentation ininterruptible.

K. Faitah and A. Achachi, Phys. Chem. News 10 (2003) 39-45
40
2. L’onduleur : La conversion courant
continu/alternatif
2.1 Le circuit de puissance [1]
Pour obtenir une tension alternative à partir
d’une batterie de 12V, il suffit d’utiliser un
transformateur doté d’un primaire à prise centrale
et piloter deux Hexfets (VMOS de puissance) par
deux signaux MLI déphasés de 180 degrés.
D’après la figure 2, les filtres L/C placés entre les
sorties des deux Hexfets et le primaire du
transformateur, servent à transformer toutes les
impulsions présentes dans le signal carré en une
tension sinusoïdale.
K'1
K1
D'1
D1
+
-
n2
n1/2
n1/2
ik'1
ik1
i
I'
U'
~
Vk'1
Vk1
V'1
V1
E
Batterie
K1, K'1 : Interrupteurs statiques
Filtre L-C
Figure 2 : Montage du convertisseur continu/alternatif.
2.2. Circuit de commande
2.2.1 Le choix du microcontrôleur [2]
Pour le choix du microcontrôleur, nous avons
opté pour celui qui exploite le plus, les ressources
matérielles et logicielles. Notre solution est basée
sur les variantes suivantes :
• la réduction de l’encombrement matériel et du
circuit imprimé ;
• la richesse du jeu d’instructions du
programme ;
• la vitesse d’exécution du programme ;
• la facilité de la programmation du
microcontrôleur par un PC en utilisant un logiciel
d’assemblage et de transfert ;
• et enfin la quantité mémoire RAM et
EEPROM du microcontrôleur.
Une étude comparative entre ces différentes
techniques nous a mené à choisir le 68HC11F1
dont nous avons réalisé son programmateur,
illustré par la figure 3.
2.2.2 Modulation MLI [4]
Comme nous l’avons déjà avancé, les signaux
de commande des bras de l’onduleur (les Hexfets
de puissance), doivent être modulés en largeurs
d’impulsions. Toutefois dans ce travail, il est
inutile d’utiliser un bloc d’isolation entre le circuit
de commande et le circuit de puissance, étant
donné que la protection entre ces deux circuits est
assurée par les VMOS dotés des grilles isolées.
Dans la figure 4a, le circuit numérique à base de
portes logiques protège la batterie
d’accumulateurs de 12V contre tout court-circuit
par :
- l’établissement d’un déphasage de 180°
entre les deux signaux MLI ;
- le décalage horaire entre l’instant de fermeture
d’un Hexfet et l’instant d’ouverture de l’autre et
inversement [5].
Pour avoir à la sortie de l’alimentation un signal
sinusoïdal, les impulsions MLI doivent être
générées avec un rapport cyclique bien précis,
variant de 1% à 99%, puis de 99% à 1% tout les
10 ms (demi-cycle), nous avons pour cela élaboré
un programme écrit en assembleur dont
l’organigramme est représenté par la figure 4b et
exécuté par le microcontrôleur.
2.2.3. Contrôle de l’amplitude du signal de sortie de
l’onduleur
Si la tension de sortie doit subitement
augmenter ou diminuer sous l’effet de la décharge
de la batterie lors de la coupure du secteur, l’étage
de contrôle illustré par la figure 5 prélève une
fraction de la tension de sortie, la compare à une
référence «image de la tension à réguler (soit
220V)», puis agit sur le programme de génération
de la MLI par l’intermédiaire d’une ligne
d’interruption du timer programmable du
microcontrôleur [6].
Microcontrôleur
Oscillateur 2MHz
MAX 232 Ordinateur
Port D
Port Série
Figure 3 : Programmateur du microcontrôleur [3].

K. Faitah and A. Achachi, Phys. Chem. News 10 (2003) 39-45
41
Circuit logique
Pb0
Microcontrôleur
Vers les bras de
l’onduleur
Figure 4a : Synoptique de la commande de l’onduleur.
Début
- Configuration du port
- Configuration du Timer
Timer en capture d'entrée pour la
régulation de la tension de sortie
Génération des niveaux hauts et bas avec un
rapport cyclique croissant et une période
d'échantillonnage = 100µs
Génération des niveaux hauts e
t
b
as avec un rapport cyclique
décroissant
Temporisation
de 5 ms
Temporisation
de 5 ms
Figure 4b : Algorithme de génération des signaux MLI pour les bras de l'onduleur.
Batterie
+
-
Comparaison avec
la consigne
Timer du
microcontrôleur
bras de
l'onduleur
220 V
50 Hz
Abaisseur de
tension et
redresseur
Figure 5 : Synoptique de la régulation de la tension de sortie.

K. Faitah and A. Achachi, Phys. Chem. News 10 (2003) 39-45
42
3. Chargeur de batterie
La batterie utilisée dans cette réalisation, doit se
charger en permanence par le courant issu du
secteur.
D’après la figure 6, le microcontrôleur reçoit la
tension aux bornes de la batterie et la tension
image du courant de charge de la batterie
(représentée par la tension aux bornes du shunt),
les convertit en des valeurs numériques, puis les
traite par un programme assembleur dont
l’algorithme est représenté par la figure 7, et
assure donc la charge de la batterie en respectant
les contraintes suivantes [7]:
• Courant de charge constant ;
• détection de fin de charge ;
• arrêt et reprise automatique de la charge.
ISOLATION
Commutateur
Batterie
Shunt
Diviseur de
tension
Microcontrôleur
68HC11F1
Vsh
Vb Vbat
Circuit de
détection de
passage à zéro
du secteur
Interruption
du micro.cont
Ic
Vg
Courant de charge
Secteur
abaissé Redresseur
220 V
Secteur
~
1
32
Figure 6 : Montage synoptique du contrôle de la batterie.
DEBUT
- Configuration du CAN.
- 2 Ports en sortie.
Origine du Prog à $FE00
#$03FF S (la pile)
#$1000 X (l’index)
Sélection de la ligne PE0 pour la
conversion de Ic
Conversion
terminée ?
Vbn1<Vbn <Vbn2
REG I Alarme I
Sélection de la ligne PE1 pour la
conversion de Vb
α
α
Conversion
terminée ?
ARRET V
ALARMV
Génération d’un train
d’impulsions
Vshn = Vshnr ?
Vshn représente l’équivalent numérique de Vsh
Figure 7 : Organigramme du contrôle de charge de la batterie.

K. Faitah and A. Achachi, Phys. Chem. News 10 (2003) 39-45
43
4. Résultats et discussions
Les résultats obtenus montrent que nous avons
pu obtenir des signaux modulés en position pour
le contrôle de la charge de la batterie
comme
l’illustre la figure 8.
Al’aide du microcontrôleur, nous avons généré
avec une grande fiabilité des signaux MLI pour la
commande des deux bras de l’onduleur,
représentés par la figure 9.
Figure 8 : Chronogramme des signaux de contrôle de charge de la batterie.
Figure 9 : Chronogramme des signaux MLI synchrones avec la tension du secteur.
La modulation de largeur d’impulsions des
signaux de commande, le filtre inséré à la sortie de
l’onduleur et la commande numérique à l’aide du
micocontrôleur des différents étages de
l’alimentation, permettent d’aboutir à un signal
sinusoïdal, de fréquence égale à celle du secteur
(soit 50 Hz), sans perturbations hautes fréquences,
comme présenté par la figure 10.
 6
7
6
7
1
/
7
100%