Restauration d`images 3D corrigées par OA en vue de l`imagerie de

Restauration
d’images 3D
L. Mugnier
et coll.
Contexte
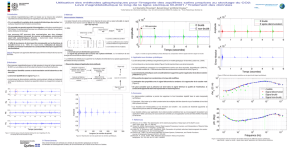
Déconvolution
3D
Conclusion et
perspectives
1 / 15
THE FRENCH AEROSPACE LAB
Restauration d’images 3D corrigées par OA
en vue de l’imagerie de la rétine
L. Mugnier (1,4), G. Chenegros(2,4), M. Glanc (2,4),
M. Nicolas(1,2,4), F. Lacombe (3)
1. ONERA / DOTA, Châtillon
2. Observatoire de Paris / LESIA, Meudon
3. Mauna Kea Technologies, Paris
4. Groupement d’Intérêt Scientifique PHASE
JRI OA, 19 novembre 2008


Restauration
d’images 3D
L. Mugnier
et coll.
Contexte
Déconvolution
3D
Conclusion et
perspectives
3 / 15
Imagerie rétinienne
Pour quoi faire ?
Diagnostic précoce et suivi de pathologies rétiniennes :
30 millions de personnes atteintes de DMLA en 2000.
135 millions de personnes atteintes de diabète.
134 millions de personnes atteintes de glaucome.
50% des cas de cécité sont dus à ces trois pathologies.
Pronostic en 2025 : vers un triplement de ces chiffres.
Étude de l’effet de nouvelles molécules thérapeutiques.
Besoin :
images rétiniennes in vivo ;
avec une résolution 3D à l’échelle cellulaire (<5µm).

Restauration
d’images 3D
L. Mugnier
et coll.
Contexte
Déconvolution
3D
Conclusion et
perspectives
4 / 15
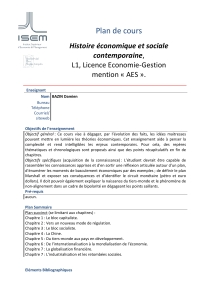
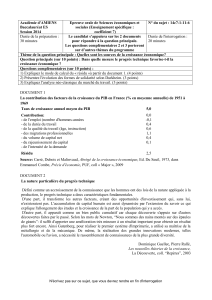
Problèmes à résoudre
Présence d’aberrations dynamiques au niveau de l’œil :
dégradation de la résolution latérale des images.
OA nécessaire... mais non suffisante :
correction partielle
imagerie 3D
⇒mélange de tous les plans dans chaque image 2D :
mauvaise «résolution longitudinale».
ϕd
z
o1 o2 o3
z’
i1
Rétine Détecteur
Système:
Optique adaptative
Oeil +
Système optique +

Restauration
d’images 3D
L. Mugnier
et coll.
Contexte
Déconvolution
3D
Conclusion et
perspectives
4 / 15
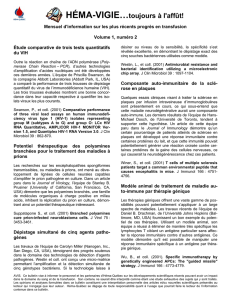
Problèmes à résoudre
Présence d’aberrations dynamiques au niveau de l’œil :
dégradation de la résolution latérale des images.
OA nécessaire... mais non suffisante :
correction partielle
imagerie 3D
⇒mélange de tous les plans dans chaque image 2D :
mauvaise «résolution longitudinale ».
ϕd
z
o1 o2 o3
z’
i1
Rétine Détecteur
Système:
Optique adaptative
Oeil +
Système optique +
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
1
/
28
100%