TD - PCSI-PSI AUX ULIS

TD
TD-Révisions : Mécanique du point
1 Point matériel soumis à un seul champ de force centrale
Soit un point matériel M de masse m soumis à une force centrale −→
Fde centre de force O. On étudie
son mouvement dans un référentiel galiléen Rg. Dans un premier temps on repère le point M en coordonnées
sphériques (r, θ, φ).
1. Définir une force centrale.
2. Montrer que le moment cinétique de M en O −→
LOse conserve. Montrer alors que le mouvement s’effectue
dans un plan passant par le centre de force.
Par la suite on étudiera le mouvement du point M dans le plan du mouvement défini à la question précédente,
de repère polaire (O, −→
ur,−→
uθ).
3. Montrer que −→
LO=mC−→
uzoù C=r2˙
θest appelée constante des aires.
4. On rappelle que la vitesse aréolaire correspond à l’aire balayée par le vecteur −−→
OM par unité de temps
dA
dt . Montrer la loi des aires :
dA
dt =|C|
2
On donne l’aire balayée par −−→
OM pendant dt : dA =1
2
−−→
OM ∧d−−→
OM
.
2 Conservation de l’énergie mécanique : état lié et état de diffusion
On considère la situation du paragraphe précédent, en considèrant cette fois que la force centrale est de
norme invariante par rotation autour de O : −→
F=F(r)−→
ur, et dérove d’une énergie potentielle Ep(r).
1. Montrer que l’énergie mécanique peut s’écrire sous la forme :
Em=Ecr +Epef f
Ecr =1
2m˙
r2est l’énergie cinétique radiale
Epeff =1
2mC2
r2+Ep(r)est l’énergie potentielle effective
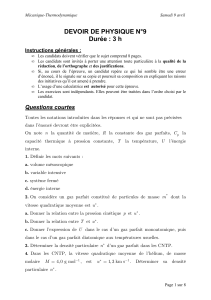
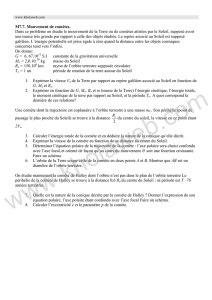
2. Sur les graphes ci-dessous on a tracé l’énergie potentielle effective enf onction de r dans les cas d’une
force d’intreraction de type newtonienne attractive et répulsive. Dans chacun des cas suivants, préciser si
le point matériel M se trouve dans un état lié ou un état de diffusion, ainsi que le domaine de définition
de r :
a) Interaction attractive, Em>0
b) Interaction attractive, Em= 0
c) Interaction attractive, Em<0
d) Interaction attractive, Em=Epeff (ro). Préciser la nature du mouvement.
e) Interaction répulsive, Em>0
1PSI, lycée de l’Essouriau, 2015/2016

TD
3 Mouvement dans un champ de force newtonien
On étudie le mouvement d’une planète, considérée comme un point matériel P de masse m, dans le référentiel
héliocentrique, de centre S. On note M la masse du Soleil.
1. Enoncer les trois lois de Kepler.
Pour simplifier, on considère le cas particulier où le mouvement de la planète est circulaire de rayon R. On
a donc −→
SP =R−→
ur.
2. Montrer que le mouvement est uniforme et donner l’expression de la vitesse v de P en fonction de G la
constante de gravitation universelle, M et R.
3. Etablir la troisième loi de Kepler dans le cas de l’orbite circulaire.
Certains satellites de communication doivent toujours être positionnés au même endroit du ciel à partir d’un
point terrestre (par exemple, certaines antennes paraboliques de télévision par satellite pointent vers un satellite
donné et sont réglées une seule fois) : de tels satellites sont dits géostationnaires. Leur période de révolution
autour de la Terre doit donc être égale à celle de rotation de la Terre sur elle-même. La trajectoire d’un satellite
est située dans un plan contenant le centre de la Terre. Si ce plan n’est pas celui de l’Équateur, le satellite ne
peut rester au-dessus d’un même point de la surface terrestre. Un satellite géostationnaire évolue donc dans le
plan équatorial.
4. Calculer l’altitude d’un satellite géostationnaire. Données : G= 6,69.10−11SI,MT= 6,0.1024K g.
On définit les vitesses cosmiques :
— Vitesse en orbite basse : il s’agit de la vitesse d’un satellite "rasant" la surface de l’astre considéré.
— Vitesse de libération : il s’agit de la vitesse minimale à communiquer à un objet soumis uniquement à
une force gravitationnelle pour qu’il puisse s’éloigner à l’infini du centre de force.
5. Exprimer puis calculer la vitesse en orbite basse d’un satellite terrestre.
6. Exprimer puis calculer la vitesse de libération d’un satellite terrestre. On fera l’hypothèse que le satellite
n’est soumis à aucun frottement.
4 Quelques sujets de concours
— Extrait de e3a-PSI-2007 : étude mécanique d’une fusée et de son satellite. Thèmes abordés : bilan
de quantité de mouvement (bon entrainement sur les bilans macroscopiques!) et mouvement en orbite
circulaire.
— Extrait de Mines-Pont-PSI-2011 : métro gravitationnel. Thèmes abordés : théorème de Gauss pour le
champ de gravitation (bon entrainement!), mouvement à force centrale .
— Extrait de e3a-MP-2015 : Atterrissage du module Philae. Thèmes abordés : mouvement à force centrale,
énergie, résolution grapho-numérique.
2PSI, lycée de l’Essouriau, 2015/2016



´
ECOLE DES PONTS PARISTECH
SUPAERO (ISAE), ENSTA PARISTECH,
TELECOM PARISTECH, MINES PARISTECH,
MINES DE SAINT–´
ETIENNE, MINES DE NANCY,
T´
EL´
ECOM BRETAGNE, ENSAE PARISTECH (FILI`
ERE MP)
´
ECOLE POLYTECHNIQUE (FILI`
ERE TSI)
CONCOURS D’ADMISSION 2011
PREMI `
ERE ´
EPREUVE DE PHYSIQUE
Fili`
ere PSI
(Dur´
ee de l’´
epreuve: 3 heures)
L’usage de la calculatrice est autoris´
e
Sujet mis `
a disposition des concours : Cycle international, ENSTIM, TELECOM INT, TPE–EIVP
Les candidats sont pri´
es de mentionner de fac¸on apparente sur la premi`
ere page de la copie :
PHYSIQUE I — PSI.
L’´
enonc´
e de cette ´
epreuve comporte 7 pages.
– Si, au cours de l’´
epreuve, un candidat rep`
ere ce qui lui semble ˆ
etre une erreur d’´
enonc´
e, il est invit´
e`
a le
signaler sur sa copie et `
a poursuivre sa composition en expliquant les raisons des initiatives qu’il aura ´
et´
e
amen´
e`
a prendre.
– Il ne faudra pas h´
esiter `
a formuler les commentaires (incluant des consid´
erations num´
eriques) qui vous
sembleront pertinents, mˆ
eme lorsque l’´
enonc´
e ne le demande pas explicitement. Le bar`
eme tiendra compte
de ces initiatives ainsi que des qualit´
es de r´
edaction de la copie.
TRANSPORTS PLAN ´
ETAIRES
Ce probl`
eme ´
etudie divers aspects physiques du voyage `
a l’´
echelle plan´
etaire. Il est compos´
e de
deux parties ind´
ependantes, la premi`
ere envisage le d´
eplacement d’un train dans un tunnel creus´
e
dans la sph`
ere terrestre, la seconde ´
etudie la mont´
ee d’un ascenseur le long d’un cˆ
able vertical fix´
e`
a
l’´
equateur. Dans tout le probl`
eme la Terre est assimil´
ee `
a un corps sph´
erique homog`
ene de rayon rT,
de centre OTet de masse volumique homog`
ene
µ
T.
Pour les applications num´
eriques on prendra
µ
T=5,50·103kg.m−3,rT=6,38·106m,et on utilisera
3 chiffres significatifs. On rappelle la valeur de la constante universelle de gravitation de Newton
G=6,67 ·10−11m3.kg−1.s−2. Les vecteurs sont surmont´
es d’un chapeau s’ils sont unitaires b
uxou
d’une fl`
eche dans le cas g´
en´
eral −→
OP. Une quantit´
e surmont´
ee d’un point d´
esigne la d´
eriv´
ee totale par
rapport au temps de cette quantit´
e˙
θ
=d
θ
dt . Les nombres complexes sont soulign´
es z∈C,`
a l’exception
de jtel que j2=−1.
I. — Le m´
etro gravitationnel
Dans toute cette partie on n´
eglige tous les effets de la rotation de la terre sur elle-mˆ
eme et on se place
dans le r´
ef´
erentiel g´
eocentrique que l’on supposera galil´
een.
I.A. — Etude pr´
eliminaire
On consid`
ere un point Psitu´
e`
a l’int´
erieur de la sph`
ere terrestre. On note −−→
OTP=−→
r=rb
uret −−→
g(P)
le champ gravitationnel cr´
e´
e par la terre en P.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%