Revision intra hiver 2016

1
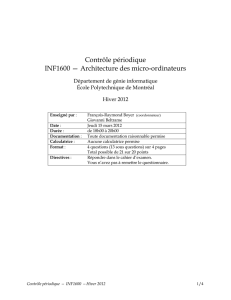
Introduction - L'architecture de Von Neumann
•Inventé par John Von Neumann in 1950
•Idée: fonctionnalité traitée comme les données
•Suivre une recette (programme)
•Appliquer chaque étape au ingrédients (données)
Cuisinier / outils
Comptoir Frigo/Table
Recette/
Programme
?Memory Input/Output
Processor
Bus

2
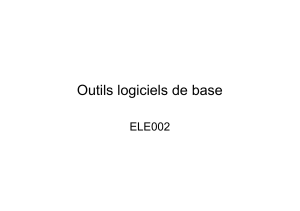
Introduction - Microprocesseur
• Exécute des instructions simples
– Arithmétique
– Logique
– Branchement (condition)
• Accompli des tâches complexes
• Programmable
• Centre de la majorité des systèmes numériques
– Aussi appelé CPU (Central Processing Unit)
– ou UCT (Unité Centrale de Traitement)
• Types plus spécialisés:
– Microcontrôleur
• Emphase sur autosuffisance et faible coût
– DSP (Digital Signal Processor)

3
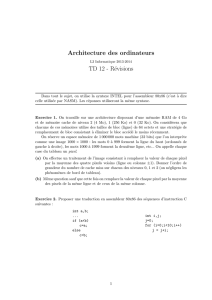
Introduction - Mémoire
DIMM:
Dual In-Line
Memory Module
Memory
Processor
Input/Output
Bus

4
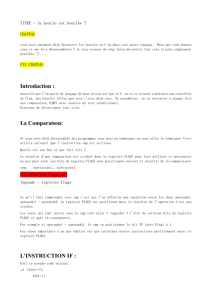
Introduction - Entrées/Sorties 4
Bus
Memory
Processor
Input/Output

5
Introduction - Logique électronique
numérique
• Portes logiques
–non (inverseur), et, ou, ou-exclusif …
–anglais: not, and, or, xor …
• Bascule bistable (D)
• Porte 3 états: 0, 1, Z
–Z=Haute impédance (grande résistance)
• Basé sur les transistors
–Plus utilisé présentement: CMOS
–Transistors NMOS et PMOS sur la même puce
•MOS = metal oxide semiconductor
–« Taille »: 180nm … 65nm … 26nm (réalisé; pas disponible)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%