Contrôle périodique

Contrôle périodique — INF1600 —Hiver 2012 1/4
Contrôle périodique
INF1600 — Architecture des micro-ordinateurs
Département de génie informatique
École Polytechnique de Montréal
Hiver 2012
Enseigné par : François-Raymond Boyer (coordonnateur)
Giovanni Beltrame
Date : Jeudi 15 mars 2012
Durée : de 18h00 à 20h00
Documentation : Toute documentation raisonnable permise
Calculatrice : Aucune calculatrice permise
Format : 4 questions (13 sous questions) sur 4 pages
Total possible de 21 sur 20 points
Directives : Répondre dans le cahier d’examen.
Vous n’avez pas à remettre le questionnaire.

Contrôle périodique — INF1600 —Hiver 2012 2/4
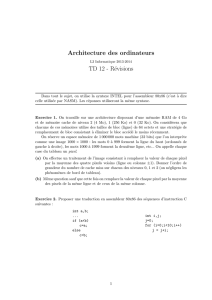
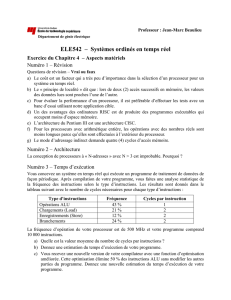
Question 1 Architecture (9 points)
Pour permettre d’exécuter une plus grande partie des instructions de l’IA-32, nous avons ajouté H à
l’architecture du devoir 1 : (les fils de contrôles ne sont pas dessinés, pour la clarté)
Q
Q
SET
CLR
DIR
32
+
Q
Q
SET
CLR
DEIP
mux
A4
Mémoire1
Donnée
Adresse
IRá23..0ñ
UAL
Mémoire2
Donnée
Adresse
Registres
[0..7]
(soit eax,
ebx, …)
Q
QSET
CLR
D
T
IRá12..0ñ
C
IRá14..13ñ
mux
B
IRá17..15ñ
IRá20..18ñ
IRá23..21ñ
DE
F
0
1
2
0
1
Circuit de
contrôle IRá31..24ñ
lecture
écriture
X Y
G
mux
H
0
1
L’UAL permet entre autres les opérations suivantes (écrit comme « contrôlesortie de l’UAL ») :
0X : 1Y : 2X + Y : 3X Y : 4X << Y : 5X >> Y ; 6Y + 4 : 7Y 4 : …
Et les registres sont numérotés (numérotation différente de celle du devoir 1) :
eax:=R[0] : ebx:=R[1] : ecx:=R[2] : edx:=R[3] : esi:=R[4] : edi:=R[5] : ebp:=R[6] : esp:=R[7]
Soit l’instruction IA-32 « JMP *16(%eax,%ebx,8) » ( pour les sous-questions a), b), c) et e) );
a) [1 pt] Donnez le RTN abstrait pour cette instruction.
b) [1 pt] Indiquez comment pourrait être codée en langage machine, sur cette architecture, une
instruction qui fait cette opération. C’est-à-dire de donner la valeur, dans la base de votre choix,
pour chacun des champs de IR que vous pouvez.
c) [3 pts] Donnez le RTN concret effectuant cette opération, en supposant que IR contient bien
l’instruction b). Donnez le cas général, avec les IRá…ñ, pas le cas spécifique pour les
registres/constantes spécifiés. Effectuez-le en le moins de cycles possibles.
d) [2 pts] Indiquez les signaux de contrôle pour « A, B, C, D, E, F, G, H, UAL, écrireEIP, écrireIR,
écrireT, écrireRegistre » (les signaux « read/write » et « enable » de Mémoire2 étant liés de
manière logique avec F et G, et la Mémoire1 étant toujours active en lecture) pour chaque cycle,
pour le RTN concret « T 8 ; EIP edx + T : T edx + T ; ecx Mémoire2[T] :
IR Mémoire1[EIP] ; ebx T >> 3 », en supposant qu’au départ IR=0x004C0008 et qu’après
son écriture, IR contient : IRá12..0ñ=3 : IRá14..13ñ=0 : IRá17..15ñ=0 : IRá20..18ñ=0 :
IRá23..21ñ=1. (Le but est de vérifier que vous savez générer les signaux pour un RTN concret
quelconque; il ne correspond pas à une instruction qui a du sens)
e) [2 pts] L’architecture ne peut pas exécuter des branchements relatifs avec des opérandes (c.-à-d.
EIP = EIP + valeur dans un registre). Proposez comment modifier l’architecture, en essayant de
minimiser la taille des modifications, pour pouvoir exécuter ce genre d’instruction. Expliquez
clairement comment l’opération sera effectuée sur votre architecture modifiée.

Contrôle périodique — INF1600 —Hiver 2012 3/4
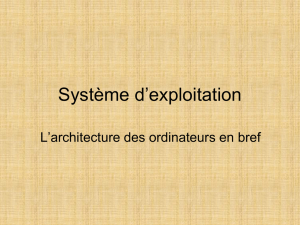
Question 2 Lecture d’assembleur (4,5 points)
Soit l’extrait de programme suivant, pour un processeur de la famille x86 (IA-32) :
.data
debut_data:
.equ c, b - a
a:
.int b
.byte 012, 16, 0x10, 0b100
b: .word -4
.balign 4
.byte 1
fin_data:
.text # Adresse à laquelle se trouve chaque
instruction :
main: mov 0x1003, %ebx # 0x2000
mov a, %ecx # 0x2006
mov (%ecx), %bl # 0x200C
mov $0x12345678, %eax # 0x200E
mov $0x100, %edx # 0x2013
mul %edx # 0x2008
mov $-2, %esi # 0x201A
mov b(%esi), %esi # 0x201F
mov $2, %edi # 0x2025
lea b-8(,%edi,2), %edi # 0x202A
mov $0b101010010,%eax # 0x2031
sub $0b10010100,%al # 0x2036
call ici # 0x2038
ici: pop %ebp # 0x203D
ret # 0x203E
# 0x203F
a) [1 pt] Donnez la valeur de chaque octet en mémoire à partir de l’adresse debut_data (incluse), jusqu’à
l’adresse fin_data (non incluse), en hexadécimal. Si debut_data vaut 0x1000, quelles sont les
valeurs associées à a, b, c et fin_data, dans la base de votre choix?
b) [2,5 pt] Donnez les valeurs de %ebx, %ecx, %edx, %esi, et %edi (dans la base de votre choix) après
l’exécution de la routine main (appelée en utilisant l’instruction « call main »).
c) [1 pt] Donner, sous forme binaire, le contenu du registre %eax suite à l’exécution de l’instruction de
soustraction, ainsi que la valeur des bits CF et OF du registre eflags. Montrez d’où proviennent
les bits CF et OF dans votre calcul et ce qu’ils signifient.

Contrôle périodique — INF1600 —Hiver 2012 4/4
Question 3 Écriture d’assembleur (3,5 points)
Soit le fichier C suivant :
float b;
int fun2(unsigned int x, float y);
int fun(unsigned int* ptr, unsigned int j, float d)
{
unsigned int res, i;
res = 0;
for(i = ptr[j+1]; i < j; ++i) {
res++;
b = b + d;
}
return fun2(res, b);
}
Traduire la sous-routine fun du C à l’assembleur; faites bien attention aux types des variables utilisées.
Indiquez à quoi sert chaque instruction assembleur, par rapport au code C. Votre programme devrait être
raisonnablement efficace (pas trop d’instructions).
Notez que l'instruction PUSH ne prends pas un registre à virgule flottante (%st(--)) comme opérande.
Question 4 Intro (4 points)
Donnez des réponses courtes et précises.
a) [1 pt] Quelle est la différence fondamentale dans la manière de transmettre les informations sur un bus
ATA (16-bits) et un bus PCIe x16 (16-bits) ?
b) [1 pt] À quoi sert l'état à haute impédance d'un buffer à trois états? Donnez un exemple de problème
possible en absence de cet état.
c) [1 pt] Sur un disque rigide standard (à une tête par surface), pourquoi le premier secteur d’un cylindre
n’est pas aligné avec le premier secteur du cylindre précédent? (Le premier secteur d’un
cylindre est celui duquel on doit lire les données en premier, pour faire une lecture séquentielle
des informations.)
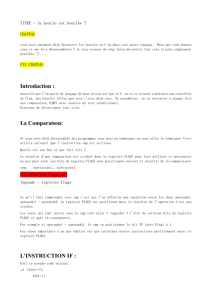
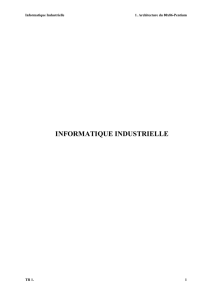
d) [1 pt] Pour quelle(s) valeur(s) de A,B,C la sortie sera à Z (haute impédance)? (où +V vaut la valeur
logique 1, et la mise à la terre vaut la valeur logique 0) :
+V
Sortie
A
C
B
+V
1
/
4
100%