Linearmotoren - Allgemeines Anwendungsbeispiel

www.gimatic.com92
09/2016
ML
ML
LV...
LV...
LVP...
Linearmotoren
Linearmotoren - Allgemeines
Linearmotoren sind "abgerollte" Rotationsmotoren, die Kräfte
anstatt Drehmomente erzeugen.
Ihr Funktionsprinzip ist identisch mit dem der
Rotationsmotoren, aus denen sie abgeleitet sind.
Die Verwendung dieser Antriebe ist bei den meisten
automatischen Bewegungen, bei denen eine lineare
Bewegung gesteuert werden soll, besonders vorteilhaft, weil
die wichtigsten Organe für die Bewegungsumwandlung wie
Riemen, Zahnstangengetriebe oder Schrauben wegfallen.
Aus diesem Grund werden sie häufig auch “direct drive”
genannt, da sie direkt mit der Last verbunden sind.
Das Fehlen der Organe für die Bewegungsübertragung
erlaubt eine bessere und präzisere Steuerung aufgrund
der hohen Steifigkeit und des Fehlens der Trägheit, welche
durch bewegende Massen, Spiele und Systemelastizität
hervorgerufen wird.
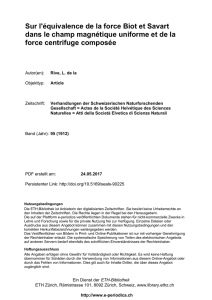
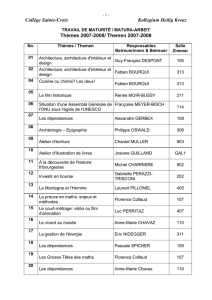
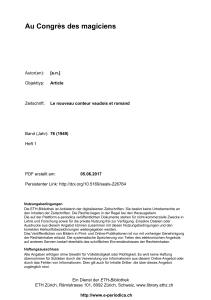
Die Hauptbestandteile des Linearmotors sind der Stator
(Primärteil), in dem die Wicklungen und der Temperatursensor
untergebracht sind, und der magnetische Schaft
(Sekundärteil), in dem sich die Permanentmagneten befinden.
Vervollständigt wird das System durch einen abnehmbaren
Positions-Encoder-Sensor, M12-Verbinder für Robotik-
Anwendungen und einem Fließpressprofil, um die Wärme
abzuführen und die Befestigung durch die "T"-Nuten und die
ISO-Zylindermaße zu vereinfachen.
Encoder-Sensor
Motor-Stator
Magnetischer Schaft
Anwendungsbeispiel
Linearmotoren
Moteurs linéaires
Moteurs linéaires - Caractéristiques principales
La principale différence entre les moteurs rotatifs et les moteurs
linéaires est que le moteur linéaire produit une force, tandis que
le moteur rotatif produit un couple.
Leur fonctionnement est identique à celui des moteurs rotatifs
desquels ils dérivent.
L'utilisation de ce type d'actionneur est particulièrement
pratique pour la plupart des mouvements automatiques où il
est nécessaire de contrôler un mouvement linéaire en éliminant
les principaux organes de conversion du mouvement comme les
courroies, les pignons-crémaillères et les vis.
C'est pour cette raison qu'ils sont souvent appelés «direct drive»
puisqu'ils sont directement raccordés à la charge.
L'absence d'organes de transformation du mouvement permet
d'obtenir un pilotage meilleur et précis grâce à la rigidité élevée
et à l'absence d'inertie dues aux masses en mouvement, aux
jeux et à l'élasticité du système.
Les principales pièces qui composent le moteur linéaire sont le
stator (primaire) où sont logés les enroulements et le capteur
de température et le curseur (secondaire) où sont insérés les
aimants permanents.
Un codeur de position amovible avec connecteurs M12 pour les
applications robotiques complète le système. Un profilé extrudé
est utilisé pour dissiper la chaleur et pour faciliter la fixation
grâce aux rainures en T et aux dimensions de type cylindre ISO.
Capteur codeur
Stator du moteur
Curseur magnétique
Exemple d’application
Moteurs linéaires

www.gimatic.com 93
09/2016
ML
ML
Linearmotoren
Linearmotoren - Vorteile
•
Kein Untersetzungsgetriebe.
•
Kein Riemen und keine Antriebsscheibe.
•
Keine regelmäßige Schmierung.
•
Kein regelmäßiger Reset.
•
Keine rotierende Welle.
•
Kein mechanisches Spiel.
•
Kein mechanischer Verschleiß.
•
Direkt mit dem Motor verbundene Last.
•
Einfache mechanische Montage.
•
Weniger sich bewegende Teile.
•
Kein sich bewegendes Teil im Inneren.
•
Weniger zu bewegende Masse.
•
Mehr Efzienz.
•
Weniger Trägheit.
•
Einfacher Wechsel der Bestandteile.
•
Es kann je nach Anwendung entweder den Stator oder der
magnetische Schaft bewegt werden.
•
Hohe Beschleunigungen.
•
Hohe Geschwindigkeiten.
•
Geringes Gewicht.
•
Kein Axialmoment.
Linearmotoren - Technologie
Das Funktionsprinzip des Linearmotors ist dasselbe wie bei
einem normalen Synchron-Brushless-Rotationsmotor.
Das Primärteil, in dem die Wicklungen untergebracht sind, kann
je nach Anwendung unbeweglich sein und das magnetische
Sekundärteil gleiten lassen oder es kann umgekehrt der
magnetische Schaft still stehen und sich der Wagen bewegen.
Die Magneten in sequentieller Nord-Süd-Anordnung ermöglichen
dem Messsystem auf dem Stator, die gegenseitige Position zu
prüfen.
Die Steuerung dieser Motoren erfolgt durch gewöhnliche
Umrichter für traditionelle Brushless-Motoren, die die Ströme im
Primärteil steuern, um eine Verschiebung um elektrische 90°
gegenüber den Magnetpolen zu erzielen und somit den Schub
zu maximieren.
Der Wechsel der Magnetpole erzeugt eine Art Rastmoment,
COGGING genannt, der anhand besonderer Funktionen (Feed
Forward), die in den Umrichtern eingebaut sind, einfach
beseitigt werden können.
Moteurs linéaires
Moteurs linéaires - Avantages
•
Absence de réducteur.
•
Absence de courroie et de poulie.
•
Absence de lubrication périodique.
•
Absence de réglage périodique.
•
Absence d'arbre en rotation.
•
Absence de jeu.
•
Absence d'usure mécanique.
•
Poussée directe du moteur.
•
Assemblage mécanique simple.
•
Moins de pièces en mouvement.
•
Aucune pièce interne en mouvement.
•
Moins de masse à déplacer.
•
Plus grande efcacité.
•
Inertie réduite.
•
Remplacement simple.
•
Sélection de la pièce mobile (stator ou curseur) en fonction de
l'application désirée.
•
Accélération élevée.
•
Vitesse élevée.
•
Poids bas.
•
Mouvement axial nul.
Moteurs linéaires - Technologie
Le principe de fonctionnement du moteur linéaire cylindrique est
le même qu'un moteur rotatif synchrone sans balai ordinaire.
Selon l'application, le primaire, où sont logés les enroulements,
peut rester immobile et faire coulisser le secondaire magnétique
ou inversement avec le curseur fixe et le stator en mouvement.
Les aimants sont placés de manière séquentielle Nord-Sud et
permettent au système de mesure logé sur le stator de vérifier la
position réciproque.
Le pilotage de ces moteurs est possible grâce à des
convertisseurs communs pour moteurs sans balai traditionnels.
Ces convertisseurs pilotent les courants dans le primaire afin
d'obtenir un déphasage électrique de 90° par rapport aux pôles
magnétiques, maximisant ainsi la poussée.
L’alternance des pôles magnétiques produit une force appelée
COGGING (frottement magnétique) qui peut être aisément
éliminée par des fonctions spéciales (Feed Forward) intégrées
aux convertisseurs.

www.gimatic.com94
09/2016
ML
Linearmotoren
Motor-Stator Ø25
•
3-Phasen-Motor mit Dreieckschaltung.
•
PTC-Wicklungstemperatur-Kontrolle.
•
Flex-Kabelausgang.
•
Schaftwischer mit hoher Gleitfähigkeit.
•
Betriebstemperatur 25°C.
•
Maximal vom Motor erreichbare Temperatur 100°C.
3-PHASEN-MOTOR - Primärdaten
ML2570X4 ML2570X6 ML25300X4 ML25300X6
Motorlänge
Longueur du moteur 200 mm 270 mm 200 mm 270 mm
Dreiphasen-Spulen-Gruppen
Groupes de bobines triphasées 4646
Polteilung
Pas polaire 35.4 mm
Außendurchmesser der Motors
Diamètre extérieur du moteur Ø25 mm
Masse
Masse 273 g 384 g 273 g 384 g
BUS-Spannung
Tension du BUS 72 Vdc 72 Vdc 325 Vdc 325 Vdc
Spitzenkraft
Force de crête 98.1 N 105.4 N 117 N 131.6 N
Spitzenstrom (100°C)
Courant de crête (100°C) 7.7 A 5.2 A 3.1 A 2.1 A
Kraftkonstante
Constante de la force 12.7 N/A 20.3 N/A 34.4 N/A 62.7 N/A
Kontinuierliche Kraft
Puissance continue 17 N 27 N 12 N 22 N
Gleichstrom (100°C)
Courant continu (100°C) 1.35 A 1.35 A 0.36 A 0.36 A
Maximale Geschwindigkeit
Vitesse maximum 6 m/s 4 m/s 9 m/s 5.7 m/s
Phasenwiderstand bei 25°C/100°C
Résistance de phase à 25°C/100°C 4.8/6.5 Ohm 7.1/9.6 Ohm 48.6/67.5 Ohm 77.5/105.1 Ohm
Induktanzwiderstand bei
Inductance de phase 1.2 mH 1.9 mH 11.2 mH 20.5 mH
BEMF-Konstante
Constante BEMF 11.6 Vs/m 18.2 Vs/m 36.3 Vs/m 57.7 Vs/m
Wärmewiderstand
Résistance thermique 5°C/W 3.45°C/W 5.75°C/W 4.35°C/W
Max. Phasentemperatur
Température de phase maximale 100°C
PTC-Wert
Valeur PTC 1 kOhm @25°C
Max. PTC-Spannung
Tension maximale PTC 40 Vdc
Anschluss
Connexion
Cavo
Cable
Schutzklasse
Classe de protection IP67
Bezugsnormen
Normes de référence EN 61000-6-2 + EC + IS1; EN 61000-6-4; EN 62233
Moteurs linéaires
Stator moteur Ø25
•
Moteur triphasé à branchement en triangle.
•
PTC de contrôle de température des enroulements.
•
Sortie câble ex.
•
Dispositif de nettoyage remplaçable pour maintenir le curseur
propre.
•
Température de service = 25°C.
•
Température maximale pouvant être atteinte par le moteur =
100°C.
MOTEUR TRIPHASÉ - Données principales

www.gimatic.com 95
09/2016
ML
Linearmotoren
Motor-Stator Ø40
•
3-Phasen-Motor mit Dreieckschaltung.
•
PTC-Wicklungstemperatur-Kontrolle.
•
Flex-Kabelausgang.
•
Schaftwischer mit hoher Gleitfähigkeit.
•
Betriebstemperatur 25°C.
•
Maximal vom Motor erreichbare Temperatur 100°C.
3-PHASEN-MOTOR - Primärdaten
ML4070X4 ML4070X6 ML40300X4 ML40300X6
Motorlänge
Longueur du moteur 204 mm 275 mm 204 mm 275 mm
Dreiphasen-Spulen-Gruppen
Groupes de bobines triphasées 4646
Polteilung
Pas polaire 35.4 mm
Außendurchmesser der Motors
Diamètre extérieur du moteur Ø40 mm
Masse
Masse 670 g 940 g 700 g 980 g
BUS-Spannung
Tension du BUS 72 Vdc 72 Vdc 325 Vdc 325 Vdc
Spitzenkraft
Force de crête 258 N 294 N 421 N 412 N
Spitzenstrom (100°C)
Courant de crête (100°C) 19 A 14.2 A 8.8 A 5.8 A
Kraftkonstante
Constante de la force 13.6 N/A 20.7 N/A 47.8 N/A 71.1 N/A
Kontinuierliche Kraft
Puissance continue 39 N 51 N 33 N 42 N
Gleichstrom (100°C)
Courant continu (100°C) 2.9 A 2.5 A 0.7 A 0.6 A
Maximale Geschwindigkeit
Vitesse maximum 5.25 m/s 4.0 m/s 7.0 m/s 5 m/s
Phasenwiderstand bei 25°C/100°C
Résistance de phase à 25°C/100°C 1.8/2.4 Ohm 2.6/3.6 Ohm 19.1/26.2 Ohm 28.9/39.5 Ohm
Induktanzwiderstand bei
Inductance de phase 0.7 mH 1.1 mH 9.08 mH 13.25 mH
BEMF-Konstante
Constante BEMF 12 Vs/m 17.5 Vs/m 41 Vs/m 62 Vs/m
Wärmewiderstand
Résistance thermique 2.78°C/W 2.52°C/W 4.02°C/W 3.36°C/W
Max. Phasentemperatur
Température de phase maximale 100°C
PTC-Wert
Valeur PTC 1 kOhm @25°C
Max. PTC-Spannung
Tension maximale PTC 40 Vdc
Anschluss
Connexion
Cavo
Cable
Schutzklasse
Classe de protection IP67
Bezugsnormen
Normes de référence EN 61000-6-2 + EC + IS1; EN 61000-6-4; EN 62233
Moteurs linéaires
Stator moteur Ø40
•
Moteur triphasé à branchement en triangle.
•
PTC de contrôle de température des enroulements.
•
Sortie câble ex.
•
Dispositif de nettoyage remplaçable pour maintenir le curseur
propre.
•
Température de service = 25°C.
•
Température maximale pouvant être atteinte par le moteur =
100°C.
MOTEUR TRIPHASÉ - Données principales

www.gimatic.com96
09/2016
ML
150
100
50
ML2570X4
0 2-2-4-6-8-10 4
-50
-100
-150
6 8 10
150
100
50
ML2570X6
ML25300X4 ML25300X6
0 2-2-4-6-8-10 4
-50
-100
-150
6 8
10
150
100
50
0 2-2-4-6-8-10 4
-50
-100
-150
6 8 10
150
100
50
0 2-2
-4
-6-8-10 4
-50
-100
-150
6 8
10
Linearmotoren
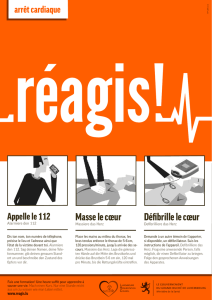
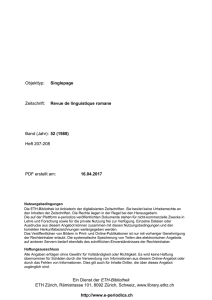
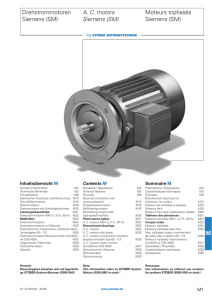
Betriebsbereiche ML25
Die nachstehenden Grafiken zeigen die Betriebsbereiche
der Linearmotoren bzw. die Gesamtheit aller möglichen
Betriebspunkte des Motors allein.
Der innere Bereich definiert den Bereich des Dauerbetriebs des
Motors und stellt die Bedingungen dar, unter denen der Motor
auf unbestimmte Zeit arbeiten kann.
Der restliche Bereich die Bedingungen, unter denen der Motor
nur für kurze Zeitspannen arbeiten kann.
Das allgemeine Bemessungskriterium sieht vor, dass die
Kennlinie der Last vollständig im intermittierenden Bereich
und der Betriebspunkt (quadratisches Mittel) innerhalb des
dauerhaften Bereichs liegen.
Intermittierend Dauerhaft
Kraft (N)Kraft (N)
Kraft (N)Kraft (N)
Geschwindigkeit (m/s)
Geschwindigkeit (m/s)
Geschwindigkeit (m/s)
Geschwindigkeit (m/s)
Moteurs linéaires
Plages de fonctionnement ML25
Les graphiques suivants montrent les plages de fonctionnement
des moteurs linéaires c’est-à-dire l’ensemble de tous les points
de fonctionnement possibles du moteur seul.
La portion la plus interne définit la zone de fonctionnement
continu du moteur et représente les conditions dans lesquelles le
moteur peut fonctionner pendant une durée indéfinie.
La portion restante indique les conditions dans lesquelles le
moteurs peut fonctionnement uniquement pendant de courtes
périodes.
Le critère général de dimensionnement prévoit que la courbe
caractéristique de la charge soit totalement incluse dans la
zone intermittente et que le point de fonctionnement (point
quadratique moyen) soit à l’intérieur de la zone continue.
Intermittente Continue
Force (N)
Force (N)
Vitesse (m/s) Vitesse (m/s)
Force (N)
Force (N)
Vitesse (m/s) Vitesse (m/s)
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%