1 GESTION AUTOMATIQUE DES DÉFAUTS DANS LES

1
GESTION AUTOMATIQUE DES DÉFAUTS DANS LES RÉSEAUX DE DISTRIBUTIONS
M. Lehtonen1, A. Matsinen2, E. Antila3, J. Kuru4, P.Vuorenpää5, E. Matinlassi5 et S.Pettissalo6
Ecole des Hautes Etudes Technologiques de Helsinki1, VTT Energy2, ABB Substation Automation Oy3,
Tekla Oy4, Kouvolan Seudun Sähkö Oy5, Vaasa Electronics Oy6, Finlande.
INTRODUCTION
La manière traditionnelle de gérer les défauts des lignes
de distribution a été la méthode empirique dans laquelle
la ligne est activée section par section jusqu’à ce que le
relais de protection déclenche le disjoncteur
d’alimentation. Lorsque la section défectueuse était
identifiée, les parties restantes du réseau étaient rétablies
par des commutateurs de ligne ou des sectionneurs. On
opérait sur ceux-ci surtout manuellement.
Après l’introduction des relais numériques, des méthodes
plus sophistiquées pour la localisation des défauts ont été
adoptées. Il était maintenant possible d’enregistrer les
courants de défaut aux sous-stations d’alimentation et, en
comparant ces valeurs aux quantités calculées
correspondantes, il était possible d’obtenir une estimation
assez bonne de la distance du défaut.
Le processus d’isolation des défauts et de rétablissement
a également été très accéléré par l’introduction de la
télécommande pour les sectionneurs. Dans certains pays,
ces sectionneurs ont été d’abord équipés d’un système de
commutation à pause qui effectue un réenclenchement
pas à pas basé sur l’automatisation locale.
Aujourd’hui, l’application de la technologie de
l’information à la gestion des défauts des réseaux de
distribution est dans une phase de développement active.
Il y a à cet égard en gros deux lignes concurrentes.
Certains ingénieurs pensent que la décision finale des
actions de contrôle doit être prise par les opérateurs. Ceci
a conduit au développement d’outils logiciels
d’assistance qui infère les emplacements possibles des
défauts, vérifie les contraintes techniques et propose des
actions correctrices (1).
Une autre ligne consiste à faire faire tout le travail au
système informatique. Jusqu’à maintenant ces systèmes
ont toutefois été rares. La raison probable en est la
difficulté d’adapter le système d’automatisation aux
conditions toujours changeantes du réseau.
Malgré ces difficultés, il semble qu’il y ait une tendance à
adopter des systèmes de commutation entièrement
automatisés. Cette solution a en sa faveur le fait que la
plupart des systèmes SCADA supportent actuellement
des séquences de commutation prédéfinies qui peuvent
être effectuées après le déclenchement d’un certain
disjoncteur de feeder, par exemple (2). L’inconvénient de
ces séquences est que les conditions du feeder concerné
doivent être maintenues constantes.
Ce rapport présente un modèle informatisé totalement
automatique, appelé modèle FI, pour la localisation des
défauts des réseaux de distribution, l’isolation des défauts
et le rétablissement de la fourniture. Le modèle
fonctionne comme partie intégrante de sous-station
SCADA et des systèmes d’automatisation des réseaux de
distribution de moyenne tension qui comprennent les
relais de protection et AM/FM/GIS (cartographie
automatisée, gérance d’exploitation et Système
d’information géographique).
Dans ce modèle, trois différentes techniques sont utilisées
pour la localisation des défauts. D’abord une estimation
de la distance des défauts est obtenue en comparant le
courant de défaut mesuré avec celui qui est calculé. Cette
information est combinée avec les données obtenues par
les indicateurs de défauts dans les points de connexion
des lignes. La troisième technique utilisée, en l’absence
de meilleures données, est l’information statistique des
fréquences de défauts.
Lorsque la section défectueuse a été identifiée, elle est
automatiquement isolée par la télécommande des
commutateurs de ligne. Pour la localisation et l’isolation
des défauts, deux stratégies en option peuvent être
utilisées. La première est un réenclenchement zone par
zone qui vérifie l’existence du défaut par commutation
d’essai. La seconde stratégie est l’isolation du défaut du
défaut simple; ici la commutation chargée de la section
défectueuse est évitée. Durant cette partie du processus
de rétablissement, la capacité des commutateurs de ligne
et la capacité thermique des sections de ligne est
automatiquement vérifiée. Lorsque le défaut a été isolé, la
fourniture est rétablie pour les parties restantes du réseau.
Dans cette phase, des connexions de réserve à partir des
feeders adjacents peuvent être utilisées. Durant le
processus de rétablissement, les contraintes techniques
du réseau sont vérifiées.

1
GESTION AUTOMATIQUE DES DÉFAUTS DANS LES RÉSEAUX DE DISTRIBUTIONS
M. Lehtonen1, A. Matsinen2, E. Antila3, J. Kuru4, P.Vuorenpää5, E. Matinlassi5 et S.Pettissalo6
Ecole des Hautes Etudes Technologiques de Helsinki1, VTT Energy2, ABB Substation Automation Oy3,
Tekla Oy4, Kouvolan Seudun Sähkö Oy5, Vaasa Electronics Oy6, Finlande.
INTRODUCTION
La manière traditionnelle de gérer les défauts des lignes
de distribution a été la méthode empirique dans laquelle
la ligne est activée section par section jusqu’à ce que le
relais de protection déclenche le disjoncteur
d’alimentation. Lorsque la section défectueuse était
identifiée, les parties restantes du réseau étaient rétablies
par des commutateurs de ligne ou des sectionneurs. On
opérait sur ceux-ci surtout manuellement.
Après l’introduction des relais numériques, des méthodes
plus sophistiquées pour la localisation des défauts ont été
adoptées. Il était maintenant possible d’enregistrer les
courants de défaut aux sous-stations d’alimentation et, en
comparant ces valeurs aux quantités calculées
correspondantes, il était possible d’obtenir une estimation
assez bonne de la distance du défaut.
Le processus d’isolation des défauts et de rétablissement
a également été très accéléré par l’introduction de la
télécommande pour les sectionneurs. Dans certains pays,
ces sectionneurs ont été d’abord équipés d’un système de
commutation à pause qui effectue un réenclenchement
pas à pas basé sur l’automatisation locale.
Aujourd’hui, l’application de la technologie de
l’information à la gestion des défauts des réseaux de
distribution est dans une phase de développement active.
Il y a à cet égard en gros deux lignes concurrentes.
Certains ingénieurs pensent que la décision finale des
actions de contrôle doit être prise par les opérateurs. Ceci
a conduit au développement d’outils logiciels
d’assistance qui infère les emplacements possibles des
défauts, vérifie les contraintes techniques et propose des
actions correctrices (1).
Une autre ligne consiste à faire faire tout le travail au
système informatique. Jusqu’à maintenant ces systèmes
ont toutefois été rares. La raison probable en est la
difficulté d’adapter le système d’automatisation aux
conditions toujours changeantes du réseau.
Malgré ces difficultés, il semble qu’il y ait une tendance à
adopter des systèmes de commutation entièrement
automatisés. Cette solution a en sa faveur le fait que la
plupart des systèmes SCADA supportent actuellement
des séquences de commutation prédéfinies qui peuvent
être effectuées après le déclenchement d’un certain
disjoncteur de feeder, par exemple (2). L’inconvénient de
ces séquences est que les conditions du feeder concerné
doivent être maintenues constantes.
Ce rapport présente un modèle informatisé totalement
automatique, appelé modèle FI, pour la localisation des
défauts des réseaux de distribution, l’isolation des défauts
et le rétablissement de la fourniture.
Dans ce modèle, trois différentes techniques sont utilisées
pour la localisation des défauts. D’abord une estimation
de la distance des défauts est obtenue en comparant le
courant de défaut mesuré avec celui qui est calculé. Cette
information est combinée avec les données obtenues par
les indicateurs de défauts dans les points de connexion
des lignes. La troisième technique utilisée, en l’absence
de meilleures données, est l’information statistique des
fréquences de défauts.
Lorsque la section défectueuse a été identifiée, elle est
automatiquement isolée par la télécommande des
commutateurs de ligne. Lorsque le défaut a été isolé, la
fourniture est rétablie pour les parties restantes du réseau.
Dans cette phase, des connexions de réserve à partir des
feeders adjacents peuvent être utilisées. Durant le
processus de rétablissement, les contraintes techniques
du réseau sont vérifiées.
INTÉGRATION DU SYSTÈME
D’AUTOMATISATION
Le modèle FI est basé sur l’étroite intégration de la
télécommande des sous-stations (SCADA), de
l’automatisation des réseaux, des relais de protection et
des systèmes AM/FM/GIS.
1. spontanément les changements des positions des
commutateurs, les données sur le fonctionnement du
commutateur de prise en charge du transformateur de la

2
sous-station et l’information sur les opérations des relais de
protection.
2. spontanément les valeurs des mesures analogiques dans
le cas où leur changement ont dépassé la zone (débits de
charge des transformateurs de sous-station, tensions à la
barre bus, courants de feeder, données météorologiques
telles que vitesse du vent, humidité de l’air, température).
3. les valeurs pour 15 minutes et 1 heure des mesures
analogiques.
Les données nécessaires pour le modèle FI sont collectées
en temps réel à partir du système AM/FM/GIS avant
d’exécuter la séquence d’automatisation. Ces données
comprennent les données techniques du feeder concernées
dans la topologie existante avant que le défaut se soit
produit. Le système SCADA fournit les informations
dynamiques telles que courants de défaut et courants de
charge mesurés à la sous-station et positions des
commutateurs de ligne.
Lorsque la séquence d’automatisation a été mise en route
pour le feeder concerné, la communication des données se
fait principalement entre le modèle FI et le système
SCADA. Cette communication comprend le réglage à
distance des relais de protection et le contrôle des
disjoncteurs et des commutateurs de ligne ainsi que la
vérification de l’état de ces dispositifs.
TECHNIQUES DE LOCALISATION DES
DÉFAUTS
Dans la partie de la localisation des défauts du modèle FI,
trois différentes sources d’information sont utilisées:
1) les indicateurs de défauts dans les points de
branchement des lignes
2) la distance du défaut calculée
3) les fréquences de défaut statistiques des différentes
sections de ligne
Lorsqu’on analyse les données provenant des indicateurs
de défauts, on doit prendre en compte leur mauvais
fonctionnement possible. D’autre part, dans de nombreux
cas, seulement une partie des sections de ligne concernées
sont équipées d’indicateurs de défauts. Ces problèmes
peuvent être réduits en combinant mathématiquement les
lectures des indicateurs. Dans le modèle d’automatisation
développé, la topologie du réseau est d’abord analysée et
les sections de ligne sont divisées en zones plus petites
limitées par les lectures des indicateurs de défauts. Selon le
cas, les probabilités de défauts de ces zones de défauts sont
d’abord calculées comme suit:
Ppp p
zmn
=⋅ ⋅−()1(1a)
Pppp
zmn
=−⋅ ⋅−() ()11(1b)
Pp p
zmn
=⋅−()1(1c)
où le cas a) s’applique à la zone où l’indicateur de direction
d’alimentation a détecté le courant de défaut, le cas b) à la
zone où l’indicateur indique qu’il n’y a pas de courant de
défaut et le cas c) à la zone connectée après le disjoncteur
de la sous-station d’alimentation. Dans (1a…1c) Pz est la
probabilité que le défaut soit dans la zone de défaut
concernée, p est la fiabilité de l’indicateur de défauts, n est
le nombre d’indicateurs de défauts déclenchés dans la zone,
autres que l’indicateur de défauts de direction
d’alimentation, et m est le nombre d’indicateurs de défauts
non déclenchés dans la zone, autres que l’indicateur de
défauts de direction d’alimentation.
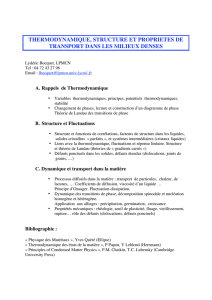
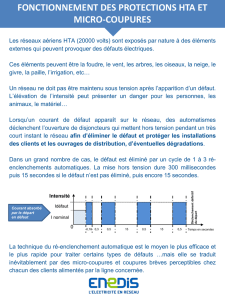
Section
Section
Section
Section
Disjoncteur
Commutateur
Indicateur de défauts
Zone de défaut
Section
Fig. 1 Les zones de défauts limitées par les lectures des
indicateurs de défauts et les sections de ligne qui peuvent
être isolées par des commutateurs télécommandés.
Les équations (1a…1c) donnent les probabilités de défauts
en ne considérant que les indicateurs connectés à la zone de
défaut concernée. En supposant qu’il n’y ait qu’un défaut
dans le feeder considéré, les probabilités peuvent être
combinées en utilisant le théorème de Bayes:
Pp
p
zi sum zi
zj
j
k,=
=
∑
1
(2a)
où
pP
P
zj
zj
zj
=−1 (2b)
et Pzj est la probabilité de défaut calculée pour la zone de
défaut j en utilisant (1a..c). Les équations (2a..b) donnent la
probabilité de défaut mathématique totale de la zone de

3
défaut concernée. En raison du nombre limité d’indicateurs
de défauts, cette zone se compose en général de plusieurs
sections de ligne. Pour trouver la section défectueuse la
plus probable parmi celles qui sont possibles, quelques
autres méthodes sont nécessaires. Dans le modèle FI, la
localisation des défauts par calcul est d’abord essayée pour
ce problème. L’opération du calcul de la distance des
défauts se fait comme suit:
1) Les relais de protection stockent les informations
sur les défauts (courants, type de défaut).
2) Le système SCADA additionne le courant de
charge du feeder mesuré et les débits de charge
actif et réactif pour le transformateur principal de
la sous-station.
3) Le système AM/FM/GIS calcule les courants de
défaut correspondants et compare les données
mesurées aux résultats du calcul.
L’étape suivante consiste à calculer les poids de probabilité
de défauts pour les sections de ligne comme suit:
wii ii
i
si kk kk
k
=−min{ . , } max{ . , }
.
,max ,min
12 09
03 (3)
où ik est le courant de défaut mesuré (deux ou trois phases),
ik,max est le courant de défaut calculé maximum de la section
concernée et ik,min est le courant de défaut calculé minimum
de la section concernée. Lorsque les poids de probabilité
wsi ont été calculés, ils sont répartis de sorte que leur
somme à l’intérieur d’une zone de défaut soit égale à
l’unité. L’étape finale du processus de localisation des
défauts est ensuite de combiner les résultats des équations
ci-dessus en répartissant la probabilité de défaut de la zone,
donnée par (2), sur les différentes sections de ligne selon
les poids donnés par (3).
Les facteurs principaux influant sur la précision de la
localisation des défauts de court-circuit sont le courant de
charge superposé au courant de défaut mesuré et la
résistance de défaut (4). Bien que le courant de charge soit
soustrait du courant de défaut mesuré, il reste encore
quelque erreur en raison de la variation de la dépendance
de la tension par rapport à l’impédance de charge. La
résistance de défaut dépend à son tour du courant de défaut
et la longueur d’arc maximum (5). Il est alors possible
d’estimer la valeur maximum de la résistance de défaut.
La troisième source d’information est les fréquences de
défaut statistiques des différentes sections de ligne. Ces
données sont en particulier utiles si le réseau est une
combinaison de sections de lignes aériennes et souterraines.
Dans ces dernières, les fréquences de défaut sont
considérablement plus basses que dans les premières. De
même que pour la distance de défaut calculée, les
fréquences de défaut statistiques sont utilisées pour calculer
les poids de probabilité pour les sections de ligne:
wf
f
si si
sj
j
k
=
=
∑
1
(4)
où fsj est la fréquence de défaut statistique de la section j.
Les données de défaut statistiques sont cependant
considérées comme des informations faibles et ne sont
utilisées que si la technique de calcul n’est pas possible.
ISOLATION DES DÉFAUTS ET
RÉTABLISSEMENT DE LA FOURNITURE
Lorsque la localisation des défauts a été analysée, la
fonction automatique pour l’isolation des défauts et pour le
rétablissement de la fourniture est exécutée. Le fonction-
nement du modèle FI est optimisé de sorte que le nombre
des interruptions subies par les utilisateurs connectés sur la
ligne défectueuse soit réduit au minimum. A cet effet, il y a
deux approches en option selon que la section de ligne
défectueuse est vérifiée par une commutation d’essai ou
non. Dans le mode de commutation d’essai, le modèle FI
essaie d’abord les sections de ligne avec la plus grande
probabilité de défauts. Le contrôle des commutateurs de
réseau se fait de telle façon que la ligne soit parcourue zone
par zone dans les plus petites sections télécommandées
possibles. Après chaque réenclenchement d’un
commutateur de ligne, l’état du disjoncteur d’alimentation
est vérifié et, s’il y a eu un déclenchement, la section de
ligne concernée est considérée comme étant défectueuse.
Lorsque la section de ligne défectueuse est trouvée, elle est
isolée et les sections restantes sont activées. Ce mode est
recommandé dans le cas où il y a un certain degré
d’incertitude dans la localisation du défaut ou si l’on désire
que le réenclenchement retardé traditionnel par des relais
de protection soit remplacé par un réenclenchement zone
par zone.
Dans le second mode, l’objectif est d’éviter complètement
la commutation d’essai. Ici la section de ligne défectueuse
est d’abord isolée et les parties restantes de la ligne sont
rétablies en utilisant un nombre minimum d’actions de
commutation. Pour être efficace, ce mode demande une
bonne connaissance de l’emplacement du défaut. Cela
signifie en pratique que des indicateurs de défauts doivent
être montés aux points de croisement des lignes où les
commutateurs télécommandés se trouvent. Le second mode
a été conçu pour être utilisé dans des zones urbaines où le

4
réseau consiste surtout en câbles souterrains et où le
réenclenchement contre des défauts n’est pas recommandé.
Dans les deux modes, le modèle FI vérifie
automatiquement les contraintes techniques du réseau avant
la commutation. Celles-ci sont les tensions thermiques
imposées par les courants de court-circuit aux lignes et
l’adéquation de la capacité d’exécution des commutateurs.
Au cas où le courant de défaut dépasserait la capacité
d’exécution, la connexion d’excitation ne se fait pas en
utilisant le commutateur de ligne, mais par le disjoncteur de
sous-station.
Lorsque l’on vérifie les tensions thermiques, la température
des conducteurs est calculée en prenant en compte toute la
séquence de clarification des défauts et les constantes de
temps de refroidissement correspondantes. S’il y a un
risque de surchauffe, le modèle d’automatisation se mettra
en mode d’attente pour que les lignes se refroidissent avant
une connexion de courant de défaut possible. Ce mode
d’attente est avantageux, en particulier dans le cas des
lignes aériennes dont les constantes de temps ne sont que
de l’ordre de minutes. Dans le cas de câbles souterrains, les
constantes de temps de refroidissement sont plus longues,
d’environ 1 heure, et le risque de grave surchauffe arrêtera
le processus de commutation automatique.
Le modèle FI essaie d’abord d’activer les sections de ligne
à partir du sens d’alimentation initial. Pour les sections qui
ne peuvent pas être activées de cette manière, une
connexion de réserve est utilisée. Avant le couplage, la
capacité de la connexion de réserve est vérifiée
relativement à la capacité de transport de charge thermique
et à la chute de tension maximum. La vérification de ces
quantités se fait en utilisant des courants de charge prévus,
avec une période de temps de 24 heures au maximum. Les
réglages des relais de protection du disjoncteur
d’alimentation sont également vérifiés afin d’assurer la
coordination des relais. Il est particulièrement important de
s’assurer que, dans le cas d’un défaut de court-circuit
biphasé dans un emplacement de ligne éloigné, le courant
de défaut est suffisamment élevé pour déclencher le relais.
CALCUL DE LA DISTANCE DES DÉFAUTS PAR
LES RÉACTANCE RELAIS
La fonction de localisation des défauts automatique
décrite ci-dessus localise le défaut sur la section de ligne
entre deux points d’isolation télécommandés. Afin
d’envoyer l’équipe de réparation sur le terrain, une
localisation plus précise du défaut est nécessaire. Celle-ci
peut être obtenue si des réactance relais sont utilisés.
Puisque la résistance de défaut est inconnue, le calcul de
la distance se fait comme réactance. La source d’erreur
principale est dans ce cas le courant de charge réactif
superposé au courant de défaut mesuré. Plus forte est la
charge du feeder concerné, plus fort est ce défaut.
Par ailleurs, dans de nombreuses sous-stations existantes,
les relais sont d’une construction relativement ancienne et
ne permettent pas la lecture à distance des courants de
défaut. Dans ces cas, il est tentant de “rattraper” la
localisation du défaut en n’équipant que le compartiment
du transformateur primaire avec la mesure de réactance.
Toutefois, dans ce cas, le courant de charge est en général
très haut et les applications de relais de réactance
classiques sont hors de question.
Pour réduire ce problème, un nouvel algorithme de
localisation du défaut a été développé. Le but est
d’estimer les courants de charge à partir des quantités
mesurées avant, durant et après le défaut et de faire la
compensation pour le courant de charge superposé au
courant de défaut (écrit pour le cas de monophasé et
biphasé):
IL2=Isj-Icor,re(uL23) Ire Is - Icor,jl(uL23) Ijl Is
(5)
IL3=Itj-Icor,re(uL23) Ire It - Icor,jl(uL23) Ijl It
Après la compensation du courant de charge, la distance
du défaut est calculée en réactance comme suit:
−
−
=32
Im LL
tjsj
II
UU
X (6)
Dans les équations ci-dessus, Ire=I1a/I1 est la part p.u. du
courant de charge à l’état normal circulant dans les lignes
parallèles en bon état, Ijl=(I1-I1a)/I1 est la part p.u. du
courant de charge à l’état normal circulant dans la ligne
défectueuse, uL23=(Usj-Utj)/(Us-Ut) est la tension p.u.
dans la barre bus de sous-station durant le défaut
comparée à la tension avant que le défaut ait eu lieu,
Icor,re(uL23) est le paramètre de correction pour la
compensation du courant de charge entrant dans les
lignes en bon état parallèles durant le défaut (obtenu par
l’éq. 7), Icor,jl(uL23) est le paramètre de correction pour
la compensation du courant de charge entrant dans la
ligne défectueuse durant le défaut. Is et It sont les
courants monophasé et biphasé avant le défaut, I1 et I1a
sont les composantes de courant séquentielles positives
avant et après la déconnexion du défaut, Isj et Itj sont les
courants monophasé et biphasé durant le défaut, Us et Ut
sont les tensions monophasé et biphasé avant le défaut et
Usj et Utj sont les tensions monophasé et biphasé durant
le défaut.
 6
6
1
/
6
100%