Microcontrôleur

Licence SPI2 - 2013 Thomas Quiniou 1
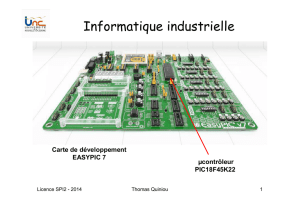
Informatique industrielle
µcontrôleur
PIC18F45K22
Carte de développement
EASYPIC 7

Licence SPI2 - 2013 Thomas Quiniou 2
Plan
• Introduction
• Les différentes bases de numération
• Logique combinatoire
• Les µcontrôleurs
• La carte de développement EasyPic7 de chez Lextronics

Licence SPI2 - 2013 Thomas Quiniou 3
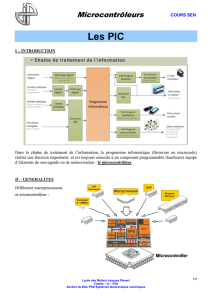
Les microcontrôleurs
Un microcontrôleur est un circuit intégré rassemblant dans un même boitier un
microprocesseur (généralement peu puissant), plusieurs types de mémoires et
des périphériques de communication (Entrées-Sorties).
Les différentes composants
programmables
Les microcontrôleurs représentent la plus grosse partie
des ventes dans le marché des microprocesseur. En effet,
un foyer moyen d'un pays développé est susceptible
d'être équipé de seulement un ou deux microprocesseurs
généralistes (ordinateurs), mais d'une ou deux douzaines
de microcontrôleurs (appareils électroménagers).
Les microcontrôleurs sont des composants microprogrammés. Plusieurs
langage sont utilisés : assembleur (bas niveau), Basic, langage C et plus
récemment C++

Licence SPI2 - 2013 Thomas Quiniou 4
Les microcontrôleurs
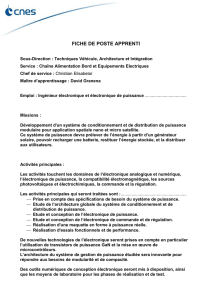
• un microprocesseur (C.P.U.), avec une largeur du chemin de données allant de
4 bits pour les modèles les plus basiques à 32 ou 64 bits pour les modèles les
plus évolués,
• de la mémoire vive (RAM, EEPROM) pour stocker les données et variables,
• de la mémoire morte (ROM) pour stocker les programmes, différentes
technologies EPROM, EEPROM, flash,
• souvent un oscillateur pour le cadencement. Il peut être réalisé avec un
quartz, un circuit RC ou encore une PLL,
• des périphériques, capables d'effectuer des tâches spécifiques.
Un microcontrôleur (µC) se présente sous la forme d’un circuit intégré réunissant tous
les éléments d’une structure à base de microprocesseur. Voici généralement ce que
l’on trouve à l’intérieur d’un tel composant :

Licence SPI2 - 2013 Thomas Quiniou 5
Les microcontrôleurs
• les convertisseurs analogiques-numériques (CAN) (donnent un nombre binaire
à partir d'une tension électrique),
• les convertisseurs numériques-analogiques (CNA) (effectuent l'opération
inverse),
• les générateurs de signaux à modulation de largeur d'impulsion (MLI, ou en
anglais, PWM pour Pulse Width Modulation),
• les timers/compteurs (compteurs d'impulsions d'horloge interne ou
d'événements externes),
• les chiens de garde (watchdog),
• les comparateurs (comparent deux tensions électriques),
• les contrôleurs de bus de communication (UART, I²C, SSP, CAN, FlexRay,
USB, Ethernet, etc.).
Parmi les périphériques, on peut mentionner entre autre :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
1
/
78
100%