20 mNm Servomoteurs CC sans balais

1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
UN
R
η max.
no
Io
MH
Co
Cv
kn
kE
kM
kI
∆n/∆M
L
τ m
J
α max.
Rth 1 / Rth 2
τ w1 / τ w2
≤
=
ne max.
Me max.
Ie max.
V DC
Ω
%
min-1
A
mNm
mNm
mNm/min-1
min-1/V
mV/min-1
mNm/A
A/mNm
min-1/mNm
µH
ms
gcm2
·103rad/s2
K/W
s
°C
N
N
N
mm
mm
g
min-1
mNm
A
Edition 2017
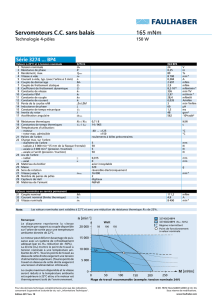
2250 S 024 BX4 S SC
(Rth2 -55%)
14 000
12 000
10 000
8 000
6 000
4 000
2 000
0M [mNm]
n [min-1]
246810 12 14 16 18 20 22 24 260
Watt
10
7,5
5 12,5
2250 S 024 BX4 S SC
2250 ... BX4 S SC
2250 S 024 BX4 S SC
20 mNm
22F, 22/7, 26A
24
5,9
70,4
10 500
0,105
84,7
0,75
1,4 ·10-4
451
2,218
21,1
0,047
125,6
250
6,97
5,3
160
1,2 / 10,5
4,2 / 332
– 40 ... + 85
20
2
20
0,015
0
97
2
12 500
15 / 20
0,8 / 1,2
UN
Série
Valeurs recommandées - mathématiquement indépendantes les unes des autres
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 1/3
Combinaisons avec
Réducteurs:
avec contrôleur de vitesse intégré
Technologie 4-pôles
Servomoteurs C.C. sans balais
Tension nominale
Résistance entre phases
Rendement
Vitesse à vide
Courant à vide (avec l’arbre ø 3,0 mm)
Couple de démarrage
Couple de frottement statique
Coefficient de frottement dynamique
Constante de vitesse
Constante FEM
Constante de couple
Constante de courant
Pente de la courbe n/M
Inductance entre phases
Constante de temps mécanique
Inertie du rotor
Accélération angulaire
Résistances thermiques
Constantes de temps thermiques
Températures d’utilisation
Paliers de l’arbre
Charge max. sur l’arbre:
– radiale à 3 000 min-1 (4 mm de la flasque frontale)
– axiale à 3 000 min-1 (pression / traction)
– axiale à l’arrêt (pression / traction)
Jeu de l’arbre:
– radial
– axial
Matériau du boîtier
Poids
Sens de rotation
Nombre de paires de pôles
Vitesse jusqu’à
Couple jusqu’à 1) 2)
Courant jusqu’à 1) 2)
1) à 5 000 min-1,
2) limite thermique avec un
Rth2
non réduit / limite thermique avec un
Rth2
réduit de 55%
Plage de travail recommandée en régime continu
roulements à billes précontraints
acier inoxydable
réversible électroniquement
Remarque:
Le diagramme représente la vitesse maximum
par rapport au couple disponible sur l'arbre
de sortie pour une température ambiante
donnée de 22°C.
Le moteur peut délivrer davantage de puis-sance
avec un système de refroidissement adéquat
(par ex. Rth 2 réduction de –55%).
Le moteur est pré-configuré à l’usine pour un
courant continu dans des conditions thermiques
isolées. Le contrôleur doit être reconfiguré avec
le logiciel simple d’utilisation Motion Manager
pour être utilisé avec d’autres paramètres.
La courbe à tension nominale (UN) montre le
point de travail dans les conditions isolées et avec
un Rth 2 réduit de 55%. Pour un fonctionnement
au-dessus de la courbe à tension nominale
nécessitera une tension supérieure. Un
fonctionnement en-dessous de la courbe à
tension nominale demandera moins de tension.
www.faulhaber.com

5 ... 28
6 ... 28
96
95
0,8
1,6
0,020
400 ... 50 000
2)
500
Edition 2017
Up
Umot
fPWM
η
Idauer
Imax
Iel
V DC
V DC
kHz
%
A
A
A
min-1
µs
2 000 min-1
024 BX4 S SC
Caractéristiques
Informations sur les connexions
Contrôleur de vitesse
Tension alimentation électronique
Tension alimentation moteur
Fréquence de commutation PWM
Rendement
Courant de sortie en régime permanent max. 1)
Courant de pointe à la sortie max.1)
Courant total de repos à UN
Gamme de vitesse:
– standard » capteurs Hall (digitale)
Periode d’échantillonnage
1) à une température ambiante de 22°C et une température du moteur de max. 60°C à la tension nominale du moteur et de l’électronique
2) la vitesse est fonction de la tension de service du moteur
Raccordement 1 "UP": alimentation électronique UP
Raccordement 2 "Umot": alimentation bobine Umot
Mise à la terre 3 "GND" : masse masse
Raccordement 4 "Uncons." :
– entrée analogique tension d'entrée Uin = 0 ... 10 V | > 10 V ... UP » valeur vitesse pas définie
résistance d'entrée Rentrée ≥ 5 kΩ
vitesse définie par 1 V,
Uentrée < 0,15 V » arrêt du moteur
Uentrée > 0,3 V » démarrage du moteur
Raccordement 5 "DIR" :
– entrée digitale sens de rotation vers la terre ou niveau < 0,5 V » dans le sens antihoraire
ouvert ou niveau > 3 V » dans le sens horaire
résistance d’entrée Rentrée ≥ 10 kΩ
Raccordement 6 "FG" : avec max. UP » Imax = 15 mA; ouverture du collecteur avec une résistance pull-up de 22 kΩ
- sortie digitale sortie fréquentielle 6 lignes par rotation
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 2/3
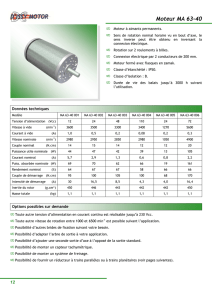
Dessin technique
Dans cette version, les servomoteurs C.C. sans balais ont un contrôleur
de vitesse intégré. Le moteur est commuté par des capteurs de Hall qui
sont intégrés dans le moteur. Le contrôle de la vitesse est effectué par
un régulateur PI.
Le contrôleur de vitesse est équipé d'un dispositif de limitation du
courant chargé de limiter le courant maximum du moteur lorsque la
charge thermique est trop élevée. On peut avoir un courant continu
multiplié par deux sur une courte durée.
A l'aide du logiciel “FAULHABER Motion Manager”, le client peut
adapter le contrôleur de vitesse aux conditions d'utilisation spéciales.
Les paramètres suivants peuvent être modifiés:
limite de courant et paramètres de régulation.
2250 S ... BX4 S SC
6 1
AAø0,06
0,02
ø22
±0,1
1
-0,05
0
-0,05
ø10 0-0,010
ø3 -0,006
150 ±10 ±0,3
12,2
ø17 3
M2
6x
Aø0,2
60°6x
20° 50
67,6 ±0,6 Câble plat en PVC
6x AWG 28, 1,27 mm
Orientation en fonction
du câble moteur ±5°
prof.
www.faulhaber.com

Edition 2017
Up
1
6
3
FG
GND
Ω
22k
61
1
-0,05
0
50
A
-0,05
ø10 0
Aø0,06
0,02
-0,010
ø3 -0,006
±0,3
67,6 ±0,6
150 ±10 12,2
ø17 3
M2
6x
Aø0,2
60°6x
20°
ø22
±0,1
15
24
3
6
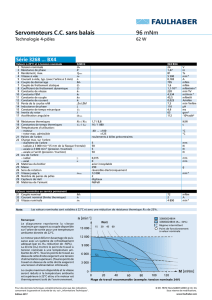
Circuit de sortie / Informations sur la connexion
Nr. Fonction
1 UP
2 Umot
3 GND
4 Uncons.
5 DIR
6 FG
Circuit de sortie
* Une résistance pull-up externe
supplémentaire peut être rajoutée
pour améliorer le temps de montée.
Attention : Ne pas dépasser un courant
Isortie de max. 15 mA.
Raccordement des
câbles
Attention :
Une erreur de connexion
des fils peut endommager
l’électronique du moteur!
Connexion
© DR. FRITZ FAULHABER GMBH & CO. KG
Sous réserve de modifications.
Pour les indications concernant durée de vie ainsi que les données
techniques complémentaires voir „Informations techniques”.
Page 3/3
Options
Variante de connecteur (Option nr.: 3809)
ruban conducteur AWG 26 / PVC avec
connecteur Micro-Fit
Accessoires
Veuillez trouver notre large gamme d‘accessoires
au chapitre « Accessoires ».
Informations pour la commande
Exemple:
2250S024BX4S SC
www.faulhaber.com
1
/
3
100%