Corpus de connaissance sur le bus CAN

SIN : Evolution et paramétrage d’un système réel
Module SIN 31 : Concevoir un système local et permettre le
dialogue entre l’homme et la machine
Ressources sur : Le bus de terrain CAN

Le bus CAN
Page 2/10 Ressources STI2D- SIN
Sommaire
1. Présentation du bus CAN .........................................................................................................3
a) Origine ...................................................................................................................................3
b) La philosophie du CAN ...........................................................................................................4
c) Les champs d’application du bus CAN ...................................................................................4
d) Le bus CAN et le modèle OSI .................................................................................................5
2. Propriétés physiques du CAN. .................................................................................................5
a) Le support physique ...............................................................................................................5
b) Synoptique d'une liaison filaire CAN intégrée dans un véhicule : ............................................6
c) Niveau dominant et niveau récessif ........................................................................................7
d) Arbitrage ................................................................................................................................7
e) Version du bus CAN et niveaux électriques ............................................................................9
3. Les différentes trames CAN : ................................................................................................. 10
a) Trame de données au format standard CAN 2.0 A : ............................................................. 10
b) Trame de données au format étendu CAN 2.0 B : ................................................................ 10
c) Trame de requêtes ............................................................................................................... 10
d) Trame de surcharge ............................................................................................................. 11
e) Trames d’erreurs : ................................................................................................................ 11
4. Constitution d’une trame de données ................................................................................... 11
a) Le début de trame SOF (Start Of Frame) ............................................................................. 11
b) Le champ d’arbitrage ou identificateur .................................................................................. 11
c) Le champ de contrôle ........................................................................................................... 12
d) Le champ de données .......................................................................................................... 12
e) Le champ de CRC ................................................................................................................ 12
f) Le champ d’acquittement (Acknoledge) ................................................................................ 13
g) Le champ de fin de trame EOF (End Of Frame) ................................................................... 13
h) Le champ int ......................................................................................................................... 13
i) IDLE ..................................................................................................................................... 13
5. Fiabilité du bus CAN et protection contre les erreurs mises en place ................................ 13
a) Le bit stuffing ........................................................................................................................ 13
b) Les erreurs contrôlées par le bus CAN ................................................................................. 14
c) Identification des erreurs dans la trame CAN : ..................................................................... 14
d) Règles de confinement ......................................................................................................... 14
e) Les trames d’erreur .............................................................................................................. 15
f) Recouvrement des erreurs ................................................................................................... 16
6. Complément du bus CAN : le bus LIN ( Local Interconnect Network ). .............................. 16
7. Bibliographie et sources ........................................................................................................ 17

Le bus CAN
Page 3/17 Ressources STI2D- SIN
1. Présentation du bus CAN
a) Origine
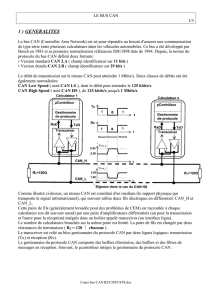
La sécurité et le confort des utilisateurs dans les véhicules ont entrainé une augmentation des
organes électroniques.
Le câblage point à point (organe à organe) est devenu très complexe et très couteux en câble. On est
passé de 200m à 2000m de câble dans un véhicule entre 1960 et 2000.
Airbag
Freinage
Transmisson suspension
Air
conditionné
Moteur
Lève vitre Fermeture
centralisée
Siège
électrique Phares
Tableau
de bord
ESP
Boite de
vitesse
D’où la nécessité d’utiliser le multiplexage qui permet la communication à tour de rôle sur le même
câble.
Airbag Freinage
Transmisson suspension
Air
conditionné
Moteur
Lève vitre Fermeture
centralisée
Siège
électrique Phares
Tableau
de bord
ESP
Boite de
vitesse

Le bus CAN
Page 4/17 Ressources STI2D- SIN
b) La philosophie du CAN
c) Les champs d’application du bus CAN
Le bus CAN
Bus asynchrone série
haut débit. Multi-maîtres
Fiabilité: ROBUSTESSE
Respect du temps réel
Initialement développé par
Bosch pour l’industrie
automobile
De nombreux fournisseurs et
produits dans le monde : flux
d’approvisionnement assuré
coûts moindres
CAN Low Speed :
Norme ISO 11519-1 et 11519-2
CAN high speed :
Norme ISO 11898.
Champs d'application du bus CAN
Electronique embarquée dans des
véhicules:
voitures
bus
camions
scooters et vélos
Bus de terrain (RLI) pour les automatismes
industriels:
C'est l'un des bus de terrain le plus répandu
au monde.

Le bus CAN
Page 5/17 Ressources STI2D- SIN
d) Le bus CAN et le modèle OSI
Le protocole CAN ne définit que la couche liaison de données (couche 2) et la couche physique
(couche 1).
2. Propriétés physiques du CAN.
a) Le support physique
Le CAN embarqué dans un véhicule :
La transmission des données est effectuée sur une paire filaire différentielle.
Couche 7 :
Application
Couche 6 :
Présentation
Couche 5 :
Session
Couche 4 : Transport
(Niveau message)
Couche 3 : Réseau
(Niveau paquet)
Couche 2 : Liaison
(Niveau trame)
Couche 1 :
Physique
MDI : Medium Dependent Interface
Connecteurs
PMA : Physical Medium Attachment
Caractéristiques Driver / Receiver
PLS : Physical Signalling
Codage/Décodage de bit
MAC : Medium Access Control
Encapsulation/Décapsulation des données
Codage de trame ( Stuffing/Destuffing )
Medium Access Management
Détection d'erreur Signalisation d'erreur
Acquittement
Sérialisation / Désérialisation
LLC: Logic Link Control
Filtrage d'acceptance des messages
Notification de surcharge : overload
Recouvrement des données
Supports physiques du CAN
Paire filaire
torsadée
Liaison infrarouge
Fibre optique
Liaison HF
Ligne (paire) torsadée
CAN_L
CAN_H
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%