ENSEA Introduction à l`apprentissage machine

ENSEA
Introduction à l’apprentissage machine
24/03/2016
Geoffroy.P[email protected]
UMR SMTS IRCAM CNRS UPMC
Geoffroy Peeters - [email protected] - 2015 - 1

1. Introduction
1.1 Qu’est que l’apprentissage machine ?
1.2 Deux grands types d’apprentissage machine
1.3 Deux grandes cibles pour l’apprentissage supervisé
1.4 Trois grandes méthodes pour l’apprentissage
supervisé
1.5 En résumé
1.6 Généralisation
2. Régression
2.1 Régression polynomiale en D“1dimension
2.2 Régression polynomiale en Dą1dimensions
3. Approche générative
3.1 Décision Bayesienne
3.2 Modèles séquentiels
4. Approche discriminante
4.1 Frontière/surface de décision
4.2 Analyse Linéaire Discriminante (ALD)
4.3 Machine à Vecteurs Supports (SVM)
4.4 Réseaux de neurones artificiels
5. Approche par exemplification
5.1 Algorithme des K Plus Proches Voisins
6. Bases de référence pour l’entraînement et le test
6.1 Base IRIS
7. Evaluation d’un système de classification
7.1 Indices de performance
7.2 Séparer ensemble d’entraînement et de test
8. Apprentissage non-supervisé
8.1 Introduction
8.2 Algorithmes des K-Means (nuées dynamiques)
8.3 Algorithme hiérarchique par agglomération
Geoffroy Peeters - [email protected] - 2015 - 2

1- Introduction
1.1- Qu’est que l’apprentissage machine ?
Apprentissage machine
‚un des champs d’étude de l’intelligence artificielle
‚la discipline scientifique concernée par le développement,
l’analyse et l’implémentation de méthodes
automatisables qui permettent à une machine (au sens
large) d’évoluer grâce à un processus d’apprentissage
‚permet de remplir des tâches qu’il est difficile ou
impossible de remplir par des moyens algorithmiques plus
classiques
source : http ://sira-
corp.com/new/MachineLearning
Geoffroy Peeters - [email protected] - 2015 - 3

1- Introduction
1.1- Qu’est que l’apprentissage machine ?
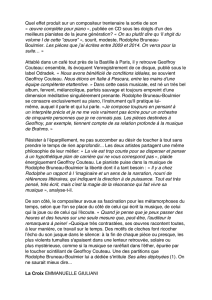
Exemple : Reconnaissance de caractère.
Comment reconnaître des caractères
manuscrits ?
‚par énumération de règles
‚si intensité pixel à la position ...
alors c’est un "3"
‚long et fastidieux, diffiçile de
couvrir tous les cas
‚en demandant à la machine
d’apprendre
‚lui laisser faire des essais et
apprendre de ses erreurs
‚Ñapprentissage machine
(machine-learning)
source : Hugo Larochelle
Geoffroy Peeters - [email protected] - 2015 - 4

1- Introduction
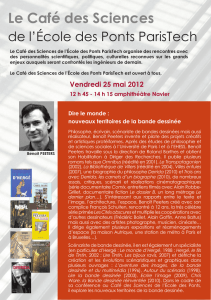
1.1- Qu’est que l’apprentissage machine ?
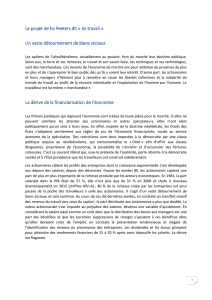
Comment ça marche ?
‚On donne à l’algorithme des données
d’entrainement
‚l’algorithme d’apprentissage machine
apprend un modèle capable de
généraliser à de nouvelles données
source : Hugo Larochelle
Geoffroy Peeters - [email protected] - 2015 - 5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
1
/
105
100%